








频道热门文章
- 它石智航×天海电子:具身智能落地汽车线束,全球首次规模化应用
- 北京亦庄设立大模型生态服务站 助力AI产业合规发展
- 新华网专访它石智航首席科学家丁文超,揭秘全球首个「能干活」的通用具身大模型AWE3.0
- 工业设备水平测量新方案!Easy-Laser®易乐XT290数显精密水平仪——毫米级精准,20小时续航
- 升级速腾聚创“千线”激光雷达组合,文远知行全新前装量产Robotaxi GXR发布
- 人形机器人的落地难题,竟被一顿“九宫格”火锅解开?
- 同款步态?这家中国人形机器人公司正面“硬刚”特斯拉!
- 新松移动机器人iMRS 2.0平台正式发布!
- 逆向而行的指尖王者-纽迪瑞创始人李灏
- 共话智造 | 锂电智造新模式,驱动新质生产力发展

技术天地列表
-
探访达芬奇机器人,凭什么能垄断整个手术机器人市场

作为机器人手术的一线“操刀者”,朱刚认为医疗界已经进入一个新的微创时代。
-
工业机器人与数控机床融合发展的途径探讨

机床是生产机器零部件的机器,简单地说就是生产机器的机器。数控机床是机床的数字化和智能化,主要通过数控装置发出信号,控制机床按图纸的要求,根据形状和尺寸,自动地将零件加工生产。数控机床较好地解决了复杂、精密、小批量、多品种的零件加工问题。说白了,就是机械零部件的生产从手工化,到机械化,再到数字化的应用过程。
-
【机器人是怎样运动】不得不知的编程

任务程序员能够指挥机器人系统去完成的分立单一动作就是基本程序功能。例如,把工具移动至某一指定位置,操作末端执行装置,或者从传感器或手调输入装置读个数等。机器人工作站的系统程序员,他的责任是选用一套对作业程序员工作最有用的基本功能。
-
国内外主流机器人离线编程软件对比
总结一下,根据我以往的使用和设计经验,离线编程仿真软件,真正的意义在于轨迹程序的设计,而不是轨迹的生成。我们要把离线软件的使用放到日常的实际工作中去理解,它不是我们偷懒的工具,而是我们工业设计的手段。当然,这也不是否认软件在生产轨迹上给我们带来的便利,只是想让那些还在学习工业机器人路上的同学们,正确看待示教器,以及正确看待离线编程软件。
-
带你走进全球最牛工厂感受机器人造梦车间的铁斧神功!
全程都由机器人独立完成马斯克还掌管着另一个大家耳熟能详的太空项目,因此特斯拉工厂在SpaceX的技术。对于“钢铁侠”来说,这里目前仅仅生产出了他的一个梦想,而更多的梦想未来也会在这个造梦车间里诞生。
-
皮尔磁|如何有效防范工业安全事故
科学研究表明,一半的致命工业事故都是由工人不正当操作引起的,除了对工人进行安全教育,更重要的是从机器上降低危险指数。
-
机器人会抢走您的工作吗?

如果计算机能“思考”,我们能否让它也像我们人类一样通过大脑思考从事我们的工作呢?马尔认为这点并不重要。他写道:“计算机能看见、理解周围的环境,并与之互动,这种技术的发展速度惊人,科学的现实已经开始与科学幻想小说的发展同步。会给人类带来生存危机的自主机器人虽然尚未诞生,但是,我们距离所谓真正的人工智能已经越来越近。”
-
瑞士科学家创造出1.4毫米厚的可穿戴“第二皮肤”
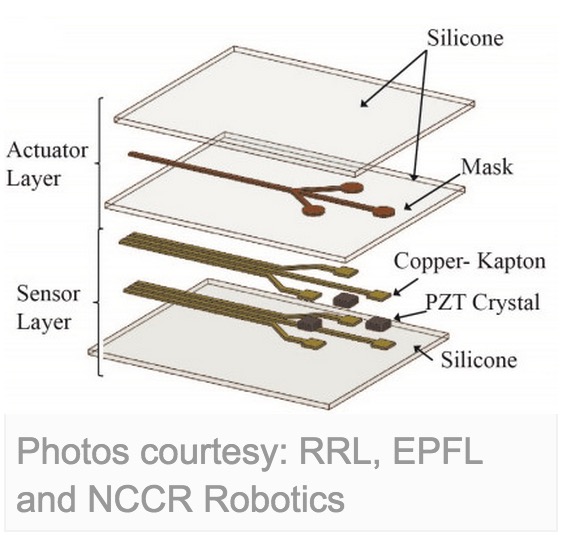
NCCR全称为The National Centre of Competence in Research ,是由瑞士国家科学基金会创立的一个全国性组织。宗旨是开发创新的、人性化的机器人技术,促进人类的生活质量提高。NCCR研发能与人类生态共生的机器人,让机器人能够同时帮助个人和社会。NCCR主要致力于三类机器人的研究:可穿戴机器人、救援机器人和教育机器人。
-
机器视觉与计算机视觉的区别和共同之处

我们研究计算机视觉的目的主要是根据人类的视觉特性来给计算机带来“光明”,让它更好的来替代人来工作或者完成人类不能完成的工作,更好的为企业减少劳动力,提高生产效率,同时也不断在提高人们的生活质量。
-
三大技术成为智能机器人发展的关键要素
人工智能技术、大数据技术、云计算技术三大技术成为智能机器人发展的关键要素。
-
移动机器人常用的定位技术

移动机器人的研究始于20世纪60 年代末期。斯坦福研究院(SRI)的NilsNilssen 和CharlesRosen 等人,在1966 年至1972 年中研造出了取名Shakey的自主移动机器人。目的是研究应用人工智能技术,在复杂环境下机器人系统的自主推理、规划和控制。
-
机器人在激光领域的应用掀开序幕

在加工过程中,LaserStacker通过切割每一层来成型,并通过熔融其中接触面处的材料将各层焊接在一起,并在更高层数上修复不需要的切割。当用户从激光切割机中拿出对象时,它已经组装好了。以一把剪刀为例,我们来展示一下它的具体工作过程:
-
年终盘点全球顶尖人机交互技术

技术成熟度曲线又叫技术循环曲线,或者直接叫做炒作周期,是指新技术、新概念在媒体上曝光度随时间的变化曲线。从 PC 到互联网再到移动互联网,IT 产业的快速发展背后是基础设施和核心技术的进步。但我们也注意到,一项技术真正改变人类生活,还是来自人机交互模式的创新。
-
AGV专题|技术篇:AGV技术发展综述

AGV作为自动搬运设备能够应用于各个行业,需求也多种多样。未来企业对AGV的需求不仅仅是简单的搬运或简单地替代人力,而是对整个工艺装备的需求,对提升产品质量的需求,对企业实现MES(制造执行系统)的整体考虑。为此,AGV的技术研发应该更加注重面向工艺、面向成本、面向服务。
-
操控上千机器人的阵列如何实现
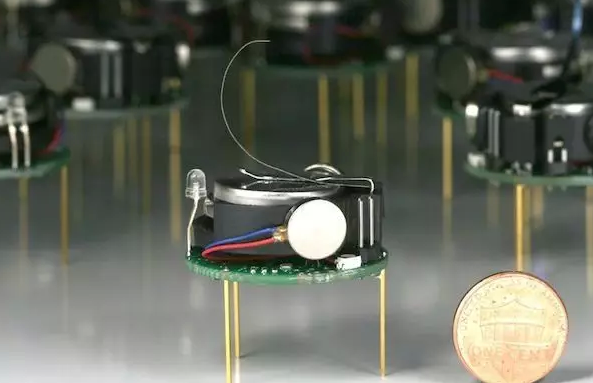
当有一千个群组机器人时,单个机器人的重要性几乎降低到零:虽然某几个机器人可能会出现故障或当机,但是机器人数量如此之大,机器人群组的集体行为趋势并没有改变,因此也没有造成任何影响。


