









编译:全浩
很多机器人系统都存在着自相矛盾的设计准则,因此这个“软性气动装置(SPAs) ”将会是一个有前途的解决方案。“高转矩或力量”常常意味着更重或者更大体积的设备,这不实用并且与可穿戴机器人的目标相悖。 “充气人工肌肉”(PAMs) 的原理,从60年代就被应用于为“机械矫正器”提供动力,运用此原理的SPAs是一种可以产生弯曲动作(同时不局限于单一方向和动作)的软性解决方案,并可以应用到更广泛的领域。
“机械矫正器”(机械外骨骼)让那些由于各种各样原因受创伤的病人可以恢复运动能力,但是很多的这类设备穿戴起来不太舒服并且很笨重,所以还没有成为普及型的应用。要想让这类设备成为日用的、实用的东西,它们表面的触觉界面必须要轻巧、柔顺、安全并且有大量的感知和刺激点才行。一个由RRL, EPFL 和NCCR Robotics组成的团队,近日出品了一个“软性气动装置(SPAs) 皮肤”,内嵌“压电式传感器(PZT)”,它可以处理这些问题并且提供“震动触觉反馈”。
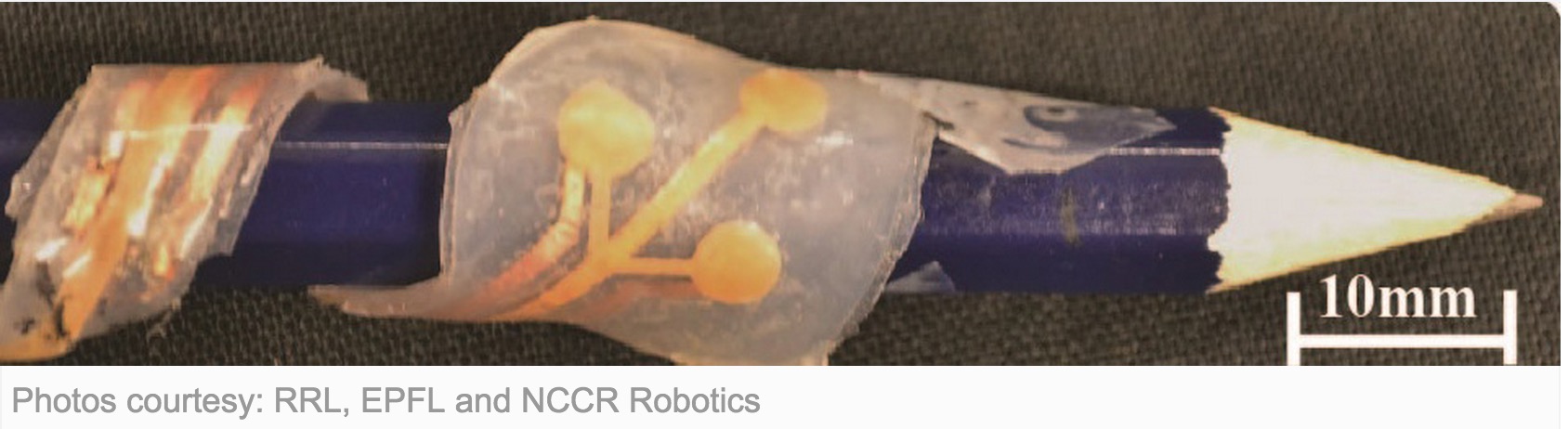
“软性气动装置(SPAs) 皮肤”可以把双向的触觉信息传递到简单的、灵敏的可穿戴界面。通过创造这种SPAs界面并且将其设计和穿戴到皮肤上,就有可能创造出一种合成的“第二皮肤”,这个“第二皮肤”轻薄且有弹性,这样传感器就可以布置在手臂的所有位置了,类似神经穿过你的皮肤。当穿戴者弯曲他们的手臂,这种皮肤和集成的触觉反馈系统会同时伴随联动。
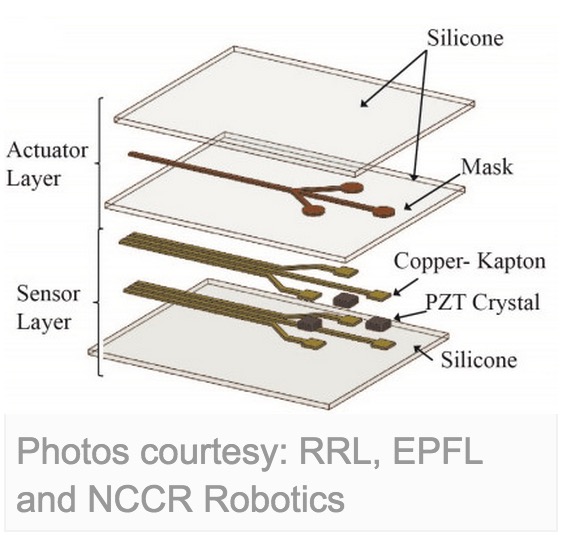
“软性气动装置(SPAs) 皮肤”有两层,一个底部的传感层( sensor layer)和一个上部的促动层( actuator layer)。促动层由两层硅薄板构成,两层之间有一个罩板以防止粘连。包括集成的传感层,最终的设计是1.4毫米厚。为了产生促动,空气会在层级间泵入,形成直径为3-4毫米的气泡,这样可以产生高达0.3N的动力,这听起来还是很小的力,但是人类日常手掌所产生的压力与此相当。传感层是用压电陶瓷元素制成,嵌入到硅薄板里,这样可把机械压力转换成电压。这种电压然后用于测量震动的强度,震动是从促动器和SPA 皮肤接触到的外部界面压力产生的。
“软性气动装置(SPAs) 皮肤” 产生一定频率范围内的“震动触觉反馈”。当有物体接触到皮肤时,力作用到外部界面,与此同时内嵌的传感器可以侦测到由促动器而来的这些震动。根据这个被侦测到的传感信息,促动器会随后主动控制震动的强度。换句话说,这个“第二皮肤”可以侦测到它正在接触什么东西,并且随之调节震动,这样的“感觉”(皮肤触觉)会是连续的。
“软性气动装置(SPAs) 皮肤” 提供了高度可定制化和可穿戴化的物理界面,同时具有多点震动触觉信号的闭合回路控制设施。它可被应用到人类身体的任何地方。如上文所描述的,它可以成为一个即插即用的反馈机制部件单元,应用到给那些失去运动能力的病人进行训练用的康复设备里,或者是虚拟现实游戏中提供触感。
注:NCCR全称为The National Centre of Competence in Research ,是由瑞士国家科学基金会创立的一个全国性组织。宗旨是开发创新的、人性化的机器人技术,促进人类的生活质量提高。NCCR研发能与人类生态共生的机器人,让机器人能够同时帮助个人和社会。NCCR主要致力于三类机器人的研究:可穿戴机器人、救援机器人和教育机器人。


