








文/新战略机器人全媒体记者 潘凤仪
众为兴的驱控一体是一款专门针对桌面机器人而开发的机器人控制系统,巧妙地将伺服驱动技术、运动控制技术和机器视觉技术融合在一台控制器上,充分满足细分行业的应用定制和工艺定制需求。

刻苦钻研,精简控制驱动系统结构
国内工业机器人系统,大多仍采用一个运动控制器加多个伺服驱动器的分布式控制方式,在实际应用中存在系统硬件冗余度高、信号传输易受干扰及价格昂贵等问题。众为兴的驱控一体化技术,很好的解决了上述问题,助力国产机器人技术水平上升一个新高度。
简约,却不简单
驱控一体不是简单将运动控制和伺服驱动放在一个盒子里。众为兴的驱控一体实现了,所有机器人的关节轴的控制用一个芯片来完成,同时控制和伺服采用并行总线,所有轴和轴之间可以达到神经级别的通信速率。
驱控一体用16位的并行总线20M的带宽,这相当于100M以太网的25倍,同步抖动更是在1ns内;同时众为兴的驱控一体采用了控制算法混合驱动算法,系统实时的直接能获取了机械手臂各轴的各种信息,可根据机械手运行姿态的变化实时的调整控制信息。
机器人做的好不好,得先能看得到
众为兴花了十余年的时间钻研机器人,最先研究的不是机器人的算法,而是测试和诊断工具。有了测试方法和诊断工具,才能把机器人这东西看透、看明白。众为兴的开发理念是:不能说一定能把机器人做到最好,但我们一定要知道,我们不好在哪里。
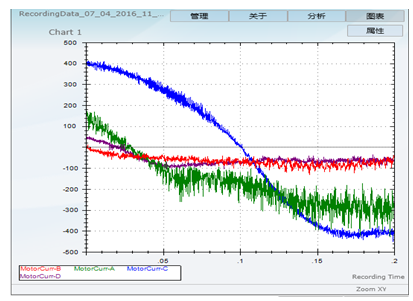
众为兴驱控一体能够成为驱控一体化的标杆,最大的亮点在于能够实时采集机器人的各种信息。众为兴在伺服技术上运用了示波器功能,驱控一体也继承了这一特性,驱控一体可以同时采集所有轴瞬间的一百多个状态信息,下图是我们采集四个关节的同一瞬间的电流,我们可以很清晰的看到每个关节的负载情况,算法有没有做对,电机的性能好不好,一目了然。
众为兴驱控一体,可以让机器人实现:
轻松拖拽,可以让机器人的编程交互变得很直观。
振动抑制,独特的末端振动抑制算法,可以保证机械手的工作精度。
四点标定,可以让机器人装配后直接上产线,然后在在线标定。机器人用久了,精度变差了,随便拖拽示教几个点,就可以恢复精度。
编程简单,支持AR语言编程、G代码编程、拖拽编程。
离线仿真,手持器上可以进行机械手动作轨迹动态仿真。
调试方便,驱控一体实现参数自整定。
运行流畅,连续轨迹速度自适应模型,能够保证机械手流畅的运行。
驱控一体满足了机器人应用市场上的经济性和适用性需求,通过众为兴的访谈中,我们看到了更明朗的驱控一体化蓝图和国产机器人新希望。


