








物流无人化步入“新周期”,仓储环节成首发战略点
2020年物流行业开局最大的热点便是无人化,虽然疫情对现有行业造成了部分冲击,但同时也蕴藏着机会——被按下暂停键的“无人驾驶”即将重启,“机器换人”或再掀浪潮。随着市场需求的加速释放,在技术、资本的加持下,物流无人化将步入“新周期”。
从当前物流的整体结构看,整个物流体系是一张纵横交错的“网”,衔接的“节点”包括物流大仓、企业仓及和区域分拨点,交错的“线”则是干线运输、配送运输以及“最后一公里”配送等运输服务。从技术支撑及技术成熟度上看,基于路面无人驾驶技术的“线”部运输尚在酝酿,而处于“节点”部分的各类仓储无人化技术已经趋于成熟,逐步成为物流无人化重要战略点。

仓内无人搬运刚需明显,无人叉车潜力巨大
在市场需求、科技进步等多方面因素的推动下,传统仓储体系加快推进无人化进程。仓内无人作业设备主要包括自动分拣机器人、可穿戴设备、无人驾驶叉车以及货物识别设备,目前自动分拣技术已经相对成熟,可穿戴设备、货物识别处于研发阶段,兼顾了技术成熟度及性价比的无人叉车备受亲睐。
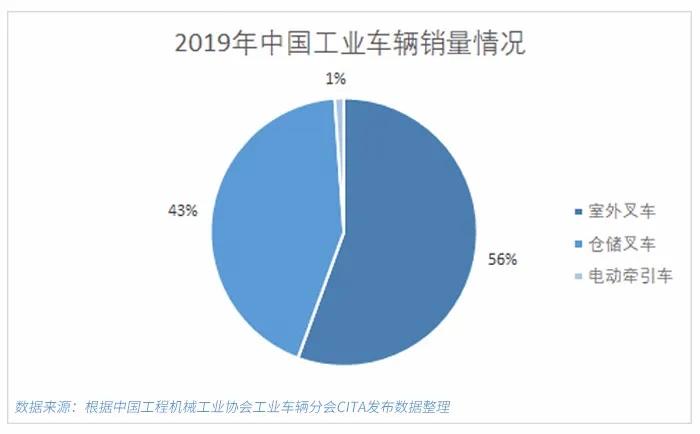
根据CITA发布的数据显示,我国2019年工业车辆销量突破60万台,同比约增长2%,其中用于室外搬运的工业车辆约31万台,占比56%,室内仓储叉车约29.86万台,占比43%,并且近年有上升的趋势。随着“机器换人”的逐步深入,无人叉车刚需明显,市场潜力巨大。
密集仓储场景复杂,无人叉车亟需攻克4大难点
从仓内作业场景看,无人叉车替代人工叉车的刚需场景有两个:1、装卸货车场景,货车分为货厢式、双飞翼、平板式,外月台,工作环境分为外月台、工厂内、纯室外堆场;2、密集存储场景,包括:驶入式货架、横梁式高货架、窄通道货架、双深度货架、穿梭式货架以及堆叠式货架等。其中,室内密集仓储场景随着自动化集成程度的加深,无人化条件趋于成熟,也是目前无人叉车投放的主要场景。

“基于中高层货架的密集仓储空间利用率较高,是目前主流的仓储形式。另一方面,密集仓储场景工况复杂,对于无人叉车同样提出了更高的要求”,中国视觉工业无人车辆代表企业未来机器人(深圳)有限公司(以下简称“未来机器人”)CEO李陆洋博士分析,这些要求主要体现在:
1)更高的精度:仓储作业中,从任务的完成度以及安全考虑,对无人叉车对定位精度和操作精度都提出了更高对要;
2)高柔性:无人叉车需要提升柔性化自适应能力,以应对非规范化的人工操作、多种载具及作业空间变化;
3)高效率:在物流行业整体提速的情况下,无人叉车能够替代人工叉车的程度主要体现在效率上;
4)安全防护:全面的防护不仅体现在行驶过程中对障碍物的识别和规避,还应该考虑在高层货架高位作业风险,如驶入式货架、窄通道货架及移动式堆叠货架等都需要更安全的技术,以保障人、车、货的安全。
深耕视觉技术,全面解锁无人叉车密集仓储应用场景
要解决当前无人叉车在密集仓储场景中面临的难题,就必须依赖于深层次的研究和创新。在谈及行业发展时,国家工程质量监督检查中心副主任陈宝强先生也强调了深层次技术创新的重要性,“缺乏创新就缺少了行业前进的动力,没有深层次的研究何来创新”。
李陆洋博士在接受新战略机器人全媒体记者采访时表示,当前无人叉车亟待提升的是智能化程度,“简单理解则是机器人应对现场不规范化的能力,而这种能力必须基于对环境的理解与学习,视觉技术是无人叉车智能化提升的必经之路,这也是未来机器人成立3年来一直在做的事情”。

图:未来机器人视觉导航高位无人叉车
视觉传感器也是近年无人叉车领域研究的热点,相对于传统的激光传感器,视觉传感器信息获取能力强大,也更具有系统拓展性:(1)一张500万像素的相片有500万个点的信息量,一秒钟如果获取和处理10张图片,就相当于获取了5000万个点的信息量;(2)图片的点相比于激光多了颜色和纹理信息,为定位、控制和环境感知提供了大量有价值的信息;(3)视觉与5G的结合是完美的,未来如果能够将图像信息通过高速网络传输到云端做边缘计算或传输到服务器做并行计算,可以进一步大幅提高视觉导航的性能。
据悉,未来机器人多年来一直深耕视觉导航技术领域,凭借着独特的技术路线及后期强大的成长和爆发力,目前未来机器人不仅完成了全球首例高位前移式叉车的无人化改造,更是挑战了当前无人码垛领域难度最高的4层以上料筐精准堆叠技术,该项技术已经在华南汽车零配件厂商巨头的无人仓储方案的项目中得到了实际的应用。3年来,未来机器人研发的视觉无人叉车产品已累计应用到150多个复杂场景,涵盖物流、保税、快消品等多个领域头部企业国内中高层密集仓储无人取放货项目。

案例一:未来机器人视觉无人叉车在堆叠式货架场景的应用
场景难点:30多种位置随机的带轮子料框堆叠,对无人叉车对智能化程度、操作精准度是巨大的考验。

案例二:未来机器人视觉无人叉车在横梁式高货架场景的应用
场景难点:高位取放货意味着相对于平面搬运,还需要进一步对货架库位进行检测,检测意味着时间的增加,无人叉车需要在效率、精度、智能化程度、安全性四者之间的平衡作决策。

场景难点:驶入式货架作业空间有限,对无人叉车定位精度和取放货精度要求是所有货架中最高的;此外,由于“华容道”式的放货节奏,无人叉车的作业效率也是重大的挑战。
据了解,未来机器人将进一步聚焦视觉无人叉车的共性需求和痛点,解锁室外装卸货场景应用,提升工业无人驾驶叉车的应用广度和深度、创新管理模式和业务模式,为更多的企业提供高效解决方案。



