









下面我们就总结一下离线编程中误差的来源以及如何使这些误差最小化。
【误差来源一:TCP测量误差】
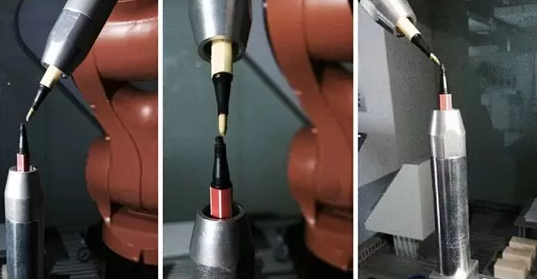
首先就要说说TCP了,想必看过小萌文章的伙伴们对此都不陌生了。TCP就是工具中心点,如果机器人工作连自己拿着的工具的中心点都找不到在哪里,可想而知这个误差有多大。所以我们就要对TCP进行测量,测量后我们要将误差控制在认可范围内,然后对其测量结果进行验证,可以在固定点处进行重定位操作,检验机器人在固定点处进行多姿态运动时是否在规定误差范围之内。

【误差来源二:工件几何与定位误差】
最后就是机器人误差了,也有两个方面:
一方面是机器人本身在加工与装配过程中所产生的误差,这就导致了最后生成出来的机器人,与其设计时的DH参数不可能完全一样,正如世界上没有两片完全一样的树叶,世界上也没有两个完全一样的机器人。
另一方面就是机器人绝对定位误差。所有机器人厂家都没有跟你讲过的一个事实。在各大机器人公开的标称参数中,都是重复定位精度,可以达到0.05mm,或者0.02mm,但不会有一家提供绝对定位精度的。绝对精度就是指实际值与理论值的一致程度。我们控制让机器人移动到每个目标点,机器人实际到达点与目标点之间存在着一定的距离误差。我们给定相同的坐标X,Y,Z,让机器人三次以不同的姿态指向它,结果竟是这样不靠谱,这让多少对机器人崇拜的机器人爱好者们的心碎了一地。但情况其实并没有那么糟,这种绝对误差只有在机器人极限的姿态下才会比较大,而舒服的姿态时,误差相对比较小,而且也是因“人”而异。
通过消除以上三方面的误差来源,可以使离线编程的精度大大提高,从而可以使机器人很好的应用于打磨、去毛刺、切割、喷涂等复杂轨迹领域。作为国内第一品牌商业化机器人离线编程软件的RobotArt,正式推出后,彻底打破了国外软件垄断的局面,大大降低了国内机器人应用的成本,同时为国内机器人应用提供了更好的服务。我们期待国人能够做出更多类似RobotArt这样优秀的机器人离线编程软件


