








文/新战略机器人全媒体记者 叶兮
近来,工业机器人控制系统出现了多种新兴技术,尤其是“驱控一体化”更是成为热议。其实,驱控一体化技术并非是机器人行业独创,但是在工业机器人领域是否是一种变革式的创举,是否能够为国产工业机器人带来更多便利性和高性价比,成为业界关注的焦点。
作为国产控制器的领先企业,众为兴在驱控一体化技术上有较高发言权,众为兴将根据多年应用和本体开发经验为我们解答驱控一体化的必然性。
驱控一体系统在机器人领域的应用
驱控一体系统是一款专门针对小型桌面机器人而开发的智能机器人控制系统,它巧妙地将伺服驱动技术、运动控制技术和机器视觉技术融合在一台机器上,通过内部高速并行总线进行信息交换,充分满足细分行业的应用定制和工艺定制要求,目前驱控一体已在多个细分行业中实现应用,下文以四轴SCARA机器人在3C产业的应用为例对这个项目进行介绍。
1迷你化机身设计
3C产业发展迅猛,其产品生产具有轻载多量的特点,这就对机械手提出了新的要求。为了能够适应小型流水线作业,机械手必须变得足够轻巧,而对应的控制系统也必须满足这个条件。众为兴驱控一体系统的设计理念是:设计最“合适的”系统,然后做到足够的小,小到可以忽略它的存在,同时兼顾性能最优化。如何实现这一点呢?最主要的一个原因是它采用了内部并行总线的方式替代繁琐的外部接线,通过内部板载走线,是普通的总线网络23倍的数据吞吐量。此外,驱控一体化技术不单数据总线是并行的,同步时钟线也是并行的,同步时钟的抖动完全靠FPGA晶振的精度和芯片电气的延时决定,轻轻松松就可以达到纳秒级别。

2专业的运动控制技术
与传统市场相比,3C行业机器人对细微技术处理、柔性化以及集成化等方面要求更高。QC驱控一体系统融合了众为兴DSP运动控制卡技术,可以实现各种直线和圆弧插补,样条教导,轨迹跟随,速度前瞻,T、E、S、C型加减速模式等功能,让机器人运动更加稳健平滑。
2.1 分布式CPU
和传统的控制平台不同,驱控一体系统并没有考虑x86的PC Base方案,这是因为虽然电脑越来越高速,但要真正做到工业现场安全、实时的要求,基于x86的平台并不能很好的保证这一点,例如一台双核的2G主频CPU,无法保证100μs中断,1μs的延迟抖动。
驱控一体系统采用了分布式CPU架构,使得硬件各尽其职。分布式CPU架构从实时角度上来说,一个CPU干一件事就是一种硬实时,保证了方案的可靠性。此外它还有效地利用了嵌入式CPU的特性来发挥系统的高效性,如FPGA适合做高频的逻辑处理,ARM适合做人机交互,DSP适合做算法运算等,各自发挥各自的特长,从而保证整体的性能更优。
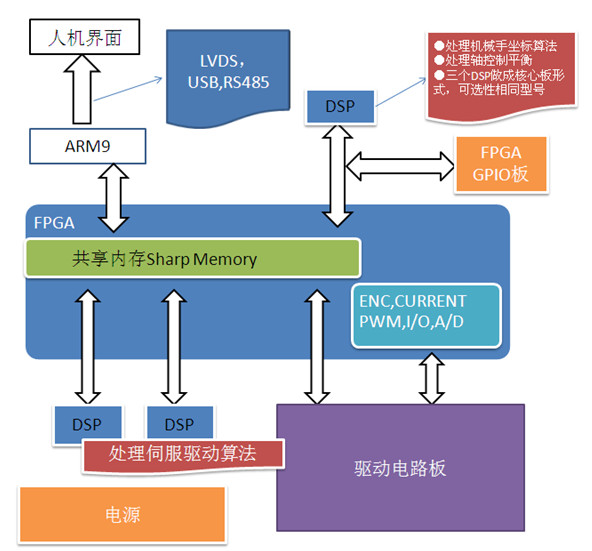
图二QC系列分布式CPU分布示意图
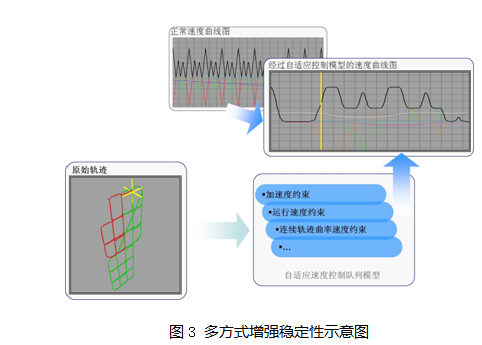
2.2多方式增强稳定性
(1)速度自适应:实际应用中,存在很多不规则运动, 驱控一体系统提出了一个自适应速度控制队列模型,通过对各种约束条件的判断来计算出一个合理的速度衔接值,从而无需做减速也能实现速度连贯。
(2)位置速度前瞻:伺服在急速加减速时也会产生大的震动,导致误差加大,驱控一体系统通过预知速度变化信息,推算轴转矩变化,动态送入伺服电流环来控制误差;
(3)实时计算惯量:驱控一体系统可以实时获取各关节的扭力变化,使机器人一些控制算法可以发生改变,例如现在研究中的机器人动力学,柔性机器人运动控制等。
2.3可编程
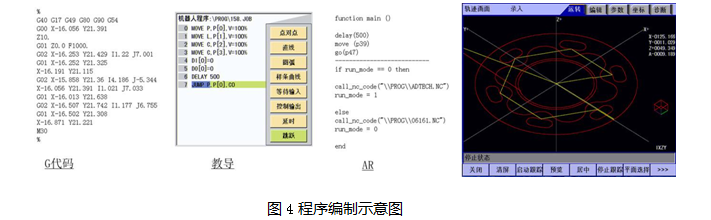
(1)QC驱控一体系统拥有海量存储空间,支持教导、G代码、AR等开发方式,让无论是编写PLC、数控机床、还是C/C++的工程师,都能够选择自己熟悉的开发方式,大大缩短了开发时间;
(2)支持在线、离线三维轨迹仿真,提高机器人现场应用的安全性。
3 世界前沿的伺服驱动技术
QC驱控一体系统融合了众为兴QX伺服驱动技术。QX伺服驱动器是众为兴经过四年不断探索,分析比较了国内外各品牌的伺服驱动产品,引进国际前沿技术,开发出来的国产高端伺服驱动产品,其性能已达国际先进水平。QX与QC的完美结合,满足工业机器人在3C等精细化产业的高速、高精等要求。
3.1兼容性强
不同种类的机器人对电机的要求也不一样,对于控制系统而言,电机的选择尤为重要,众为兴QC驱控一体系统通过支持不同的编码器来有效解决电机选择问题。
(1)编码器可选择性:目前编码器的通讯并没有统一的格式,而是由各大编码器厂家自定协议,市面上主要的高分辨率编码器厂家有日本的松下、尼康、多摩川等品牌。QC驱控一体系统可以支持这些品牌编码器。
(2)电机可选择性: QC驱控一体系统的开放性满足客户在不同应用场合电机性能的选型需求,不仅支持众为兴系列电机,还支持山洋、多摩川、松下等电机。
3.2 高速、高精度响应
伺服的精度来源于编码器和位置环的响应频率。
从编码器角度上来说,QC驱控一体系统通过支持不同编码器的协议,进而获取高分辨率的控制,例如配合松下20位的绝对式伺服马达,控制分辨率能达到一百万分之一圈(1/1048576),精度相当高。
而要达到高速下的高精,就要靠伺服的位置环刷新周期了。由于是驱控一体化的结果,伺服的位置环刷新周期可以简单理解为插补周期,以QC为例,最高可以做到16k,以10米/分钟的速度来算,16K插补周期的插补轴控制精度可以做到0.01mm插补精度,真正意义上的高速高精。这是驱控一体化技术的优势,因为16k刷新率只有在内部高速总线上才能轻松实现。
3.3 可视化数据采集
传统伺服通过脉冲或模拟量的方式与控制器连接,控制器只能获得位置信息。QC驱控一体系统具有现场总线通讯的优越性,能实时获取伺服驱动器位置、速度、电流、加速度等参数,同时通过驱控调试软件,可实时监控多个伺服驱动器的运行信息,比如电流、速度、位置大小以及跟随状态等,并以波形的形式呈现参数变化趋势。
3.4 振动抑制
在需要实现高精度制造的场合比如手机装配、电路板焊接、精密仪器加工等,振动抑制显得尤为重要。这不是速度环和位置环的调整能解决的,需要在控制方法上有所革新,QC系列驱控一体系统通过两套方案来实现振动抑制:
(1)平台振动抑制:通过陷波滤波实现机械高/低共振抑制;
(2)末端振动抑制:通过反向叠加算法,实现末端振动抑制。

3 世界前沿的伺服驱动技术
QC驱控一体系统融合了众为兴QX伺服驱动技术。QX伺服驱动器是众为兴经过四年不断探索,分析比较了国内外各品牌的伺服驱动产品,引进国际前沿技术,开发出来的国产高端伺服驱动产品,其性能已达国际先进水平。QX与QC的完美结合,满足工业机器人在3C等精细化产业的高速、高精等要求。
3.1兼容性强
不同种类的机器人对电机的要求也不一样,对于控制系统而言,电机的选择尤为重要,众为兴QC驱控一体系统通过支持不同的编码器来有效解决电机选择问题。
(1)编码器可选择性:目前编码器的通讯并没有统一的格式,而是由各大编码器厂家自定协议,市面上主要的高分辨率编码器厂家有日本的松下、尼康、多摩川等品牌。QC驱控一体系统可以支持这些品牌编码器。
(2)电机可选择性: QC驱控一体系统的开放性满足客户在不同应用场合电机性能的选型需求,不仅支持众为兴系列电机,还支持山洋、多摩川、松下等电机。
3.2 高速、高精度响应
伺服的精度来源于编码器和位置环的响应频率。
从编码器角度上来说,QC驱控一体系统通过支持不同编码器的协议,进而获取高分辨率的控制,例如配合松下20位的绝对式伺服马达,控制分辨率能达到一百万分之一圈(1/1048576),精度相当高。
而要达到高速下的高精,就要靠伺服的位置环刷新周期了。由于是驱控一体化的结果,伺服的位置环刷新周期可以简单理解为插补周期,以QC为例,最高可以做到16k,以10米/分钟的速度来算,16K插补周期的插补轴控制精度可以做到0.01mm插补精度,真正意义上的高速高精。这是驱控一体化技术的优势,因为16k刷新率只有在内部高速总线上才能轻松实现。
3.3 可视化数据采集
传统伺服通过脉冲或模拟量的方式与控制器连接,控制器只能获得位置信息。QC驱控一体系统具有现场总线通讯的优越性,能实时获取伺服驱动器位置、速度、电流、加速度等参数,同时通过驱控调试软件,可实时监控多个伺服驱动器的运行信息,比如电流、速度、位置大小以及跟随状态等,并以波形的形式呈现参数变化趋势。
3.4 振动抑制
在需要实现高精度制造的场合比如手机装配、电路板焊接、精密仪器加工等,振动抑制显得尤为重要。这不是速度环和位置环的调整能解决的,需要在控制方法上有所革新,QC系列驱控一体系统通过两套方案来实现振动抑制:
(1)平台振动抑制:通过陷波滤波实现机械高/低共振抑制;
(2)末端振动抑制:通过反向叠加算法,实现末端振动抑制。
4机器视觉通讯
QC驱控一体系统集成众为兴多来在视觉控制领域的研究成果,使驱控一体配合视觉时更具兼容性和便利性。
(1)直接九点标定接受像素坐标,对视觉的选择兼容性更强;
(2)三点标定法,可以快速建立一个和视觉坐标相匹配的机器人坐标系,试用更便利。

以上可以看出,QC系列驱控一体化系统是从最终产品的角度着手,结合细分行业的特性进行运动控制产品的定位和设计,配合不断丰富的适用于不同应用工艺的软件包,来促进机器人在各领域的广泛应用。
当前,驱控一体化技术是工业机器人发展的潮流和趋势,其是否能被机器人企业广泛的验证和接受,众为兴将在未来的实际应用中做出诠释。


