工业机器人具有工作效率高、稳定可靠、重复精度好、能在高危环境下作业等优势,在传统制造业,特别是劳动密集型产业的转型升级中可发挥重要作用。目前,国际工业机器人领域四大家族分别是ABB、KUKA、FANUC和安川电机。一般来说,工业机器人由3大部分6个子系统组成。但纵观工业机器人领域,他们产品中均未见到有服务于其控制部分(系统)的专用设备,然而在与机械臂相类似的移动机器人赛道,尤其是工业应用移动机器人中,却独辟蹊径,发展出了单独的专用控制器产品。究其原因,其一,移动机器人相比工业机械臂的各种要求都偏低,包括制造门槛、精度、厂家的整合能力等。进入门槛低造成大量不同标准的移动机器人涌入市场,使得移动机器人的定位更接近于非标设备,在将非标设备标准化的道路上,控制器就成为了核心零部件。其二,移动机器人控制器对下游集成商的能力要求和工业机械臂的对下游集成商的能力要求是一致的,如机械设计、电气设计以及方案整合的能力,集成商可以在机械臂上增加不同的末端夹具形成自动化工站(如焊接、打磨、喷涂等),也可以通过移动机器人控制器设计底盘并搭载不同的上层机构(如顶升、辊筒、料箱等),两者的逻辑一致,对集成商能力要求也一致,因此移动机器人控制器的客户并不是移动机器人本体厂家,而是大量的工业自动化的集成商。其三,终端工厂的场景具有分散且非标的特性,行业不同、终端客户需求不同、终端工厂环境不同等都佐证了场景的复杂,移动机器人在不同的场景下需要由集成商进行场景化的应用,而直接购买控制器造车成为了集成商快速打造自主品牌的最短路径。基于以上三点不难发现,移动机器人控制器和机械臂本体的发展模式和使用逻辑更为一致,即:因此,在移动机器人领域中衍生出控制器的分层则成为了必然,同时控制器厂家也为广大的集成商提供了更多差异化的选择和价值。目前大多数移动机器人本体厂家更倾向于做标准化而量大的产品,而控制器的出现,使得在非标产品中出现了部分“标准件”,可以让集成商在标准化产品的基础上再去做创新;此外,移动机器人控制器极大降低了集成商的学习及实施成本,学会了一套控制器,则可以制造顶升、辊筒、叉式、料箱等多种形态的机器人,这也是多机器人的统一控制及调度的基础。1972年,科尔摩根AGV发布了第一代ACC系列车辆控制器,标志着控制器行业正式开启篇章。在此阶段,行业更多以单片机、PLC技术形式来解决控制器问题,AGV/AMR专用控制器概念相对较弱,多以控制元器件组合为主。同时存在算法能力弱、价格贵、功能少、开发成本高、稳定性低、体积大等缺点,距离标准品商业化还有不小距离。伴随行业需求的发展,逐渐开始走向专用控制器阶段。2012年,亚马逊收购KIVA,二维码导航的机器人开始规模化应用于电商场景,标志性着控制器开始走向专机时代。此时行业开始更多出现控制器专机,在感知、决策、执行层面已经具备较为完整的处理算法,实际项目和应用场景的经验也反哺了控制器在感知、决策、执行层面的可信度、效率与易用性的提升。受限于感知层的导航定位方式以二维码,磁力,反光板等为主,行驶路径相对固定,所以在决策执行算法层面需求相对较弱。同时此阶段控制器基本以厂商自用为主,较少以专机标准品形式出现在市场。从行业角度还不具备广泛易用性,无法满足日益增长的行业客户的各类造车需求。2016年左右,以仙工智能、科聪、科钛、宾通等为代表的企业,开启以SLAM导航为主的标准品控制器。正式迈入AMR专用控制器时代,相较于此前,该阶段的控制器具有高集成性,多功能,高性能,易用性强的特点。以SLAM为核心的导航方式融合视觉等感知技术,使得路径更灵活、功能更柔性。这对感知、决策、执行算法在功能实现上有了更高要求。伴随着移动机器人应用深度及广度的不断拓展,为了更好地满足本体企业业务的需要,一些控制器厂商也在不断的迭代革新产品,如2021年仙工智能推出的全球首款功能安全认证控制器,进一步满足了AGV/AMR企业在国际化进程中对于功能安全的需求。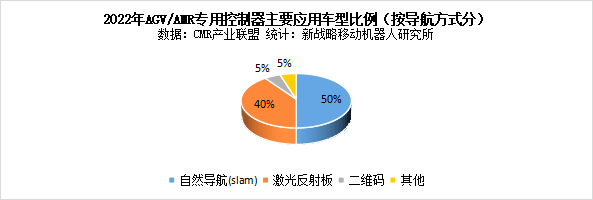
表:2022年AGV/AMR专用控制器主要应用车型比例(按导航方式分)
目前业内有部分AGV/AMR企业会选择自己开发控制器,如新松、昆船、优艾智合、斯坦德、国自机器人、坤厚等企业都在研发自己的控制模块。专业做AGV/AMR控制器及相关系统的厂商中,科尔摩根AGV最早将这一技术带入中国市场,先后与国内众多AGV/AMR企业达成了合作,提供导航控制一体化解决方案。伴随着中国AGV/AMR行业的不断发展,2015年之后,国内也有一些创业公司瞄准这一块市场开始开发相关产品,并陆续投入使用,仙工智能成为全国首个自主研发激光SLAM自主导航控制器的厂商。公司名称 | 相关情况 |
科尔摩根AGV | 1962年在瑞典成立,1972年发布第一代ACC系列车辆控制器,2003年推出第二代车辆控制器VMC500系列,2012年推出第三代车辆控制器CVC600系列,2020年发布第四代车辆控制器CVC700系列。目前科尔摩根正在研发的新一代车辆控制器CVC700 + 系列。 |
仙工智能 | 创始团队自2013年作为浙江大学代表队成员参加世界机器人足球大赛(RoboCup)时就开始积累控制器相关核心技术,是国内首个推出移动机器人控制器(SRC-500)的厂家,随后又陆续推出SRC-2000、SRC-3000、SRC-800等型号控制器。 仙工智能主要提供激光SLAM自主导航控制器,用于支持客户自主制造移动机器人。 |
睿芯行 | 2019年,睿芯行首款基于X86平台的RBrain XM001工业控制器面世,可适配不同的客户群体和应用场景,如浙江中力,林德叉车等。2022年底推出基于ARM+FPGA平台的RBrain XM002系列控制器,性能进一步优化。 |
浙江科聪 | 2015年成立,2017年发布MRC5000主要针对叉式AGV/AMR、重载AGV/AMR、产线AGV/AMR应用,2017年同期开始研制MRC3000控制器,面向产线搬运型、仓储合装和复合型等AGV/AMR应用,于2019年正式发布。 |
BlueBotics SA | 2001年成立,超过二十年的时间里一直在完善自然特征导航技术(品牌名ANT),以使AGV更容易安装和操作。在此期间,已经帮助客户公司开发了数十种ANT驱动的AGV、自动叉车和移动机器人。功能最强大的导航定位控制器产品名为ANT lite+。 |
科钛机器人 | 成立于2016年,同年推出核心控制器SmartGo,可以兼容多种车型,包括各种自主移动机器人、工业车辆,如顶升式AGV/AMR、背负式AGV/AMR、托盘叉车等;同时支持多种运动方式。 |
格局技术 | 2017年8月份推出第一代控制器,面向二维码导航应用场景;2018年推出二代产品,支持市面上主流的导航方式;2021年推出重要迭代版本,并启用GAC3作为全新产品标识。 |
易行机器人 | 2017年第一版移动机器人控制器投入使用,2019年第四版推出。2020年推出第五版移动机器人控制器,2021年第六版移动机器人控制器ECO400投入使用,开放程度再次升级。 |
成都河狸 | 成立于2019年,其AGV/AMR控制器共经历了四次迭代,第四代AGV/AMR控制器在原有的基础上实现在河狸智能所研发产品为软硬件集成的产品,主要包括移动机器人核心控制器、河狸智能群控系统及产品配套备件产品。 |
佳创博为 | 2016年佳创博为推出M4系列控制器,支持磁条导航,色带导航,惯性导航等多种导航方式。为了适应更多的应用场景以及非标开发能力,佳创博为还推出了一款具有底层导航功能及运动控制为一体的微型控制器,目前其系列产品已在多个行业应用。 |
图:中国市场主要AGV/AMR控制器厂商(排名不分先后)
随着工业应用移动机器人(AGV/AMR)智能化、柔性化与多样化的发展趋势,导航方式会愈加灵活,对算法算力要求会越来越高,因此,行业未来对于专用控制器的需求将会进一步加快!
为了更好地解读移动机器人专用控制器市场发展现状及趋势,2022年年底,由CMR产业联盟 、新战略移动机器人产业研究所主编,上海仙工智能科技有限公司冠名发布,科尔摩根自动化AB、成都睿芯行科技有限公司、英特尔联合参编的《工业应用移动机器人(AGV/AMR)专用控制器产品发展蓝皮书(2022版)》正式发布!该蓝皮书对工业应用移动机器人(AGV/AMR)专用控制器产品进行了深度调研,介绍移动机器人控制器的起源、关键技术及发展趋势以及最新的应用场景等,为移动机器人控制器研究提供有借鉴价值的参考。蓝皮书电子版完整内容可添加联盟秘书处工作人员微信免费获取!
【免责声明】所刊原创内容之本文仅代表作者本人观点,与新战略机器人网无关。新战略机器人网站对文中陈述、观点判断保持中立。本网转载自其它媒体的信息,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。
【版权声明】凡本网注明“来源:xzl机器人”的所有作品,著作权属于新战略机器人网站所有,未经本站之同意或授权,任何人不得以任何形式重制、转载、散布、引用、变更、播送或出版该内容之全部或局部,亦不得有其他任何违反本站著作权之行为。违反上述声明者,本网将追究其相关法律责任。转载、散布、引用须注明原文来源。












