







达明机器人AI Cobot (TM AI Cobot) 具备高性能与高度兼容性,内建视觉系统让机器人看得见,并拥有AI 大脑将影像数据转译成命令提示的能力,进行辨识、定位、侦测等工作,再与手臂结合一起执行工作任务。在 AI 时代,达明机器人 AI Cobot是您实现智慧工厂的理想选择!
达明机器人AI Cobot
新品:TM16
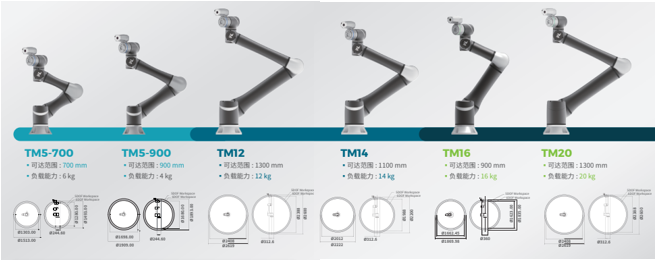
TM16专为更高的负载需求所设计,适用于机加工上下料的搬运、物流搬运和包装等应用。此机型能搬运更重的材料与大型产品,有效帮助您提高生产率。TM16有精准位置重现能力与达明机器人卓越的视觉系统,使得我们的协作机器人可以非常准确地执行任务。TM16常用于汽车业、机械加工和物流产业。
★可达范围:900mm
★负载能力:16kg
★重量:32kg
新品:TM20
TM20是达明机器人AI Cobot系列中高负载的手臂。它能够负重高达 20 公斤,轻松满足更大、更重的应用,进一步扩展机器人自动化的范畴。专为大量取放、重型机器管理以及大容量的包装和堆栈所设计。TM20适用于多种应用并能适用在大部分的产业。

★可达范围:1300mm
★负载能力:20kg
★重量:32.8kg
达明机器人AI Cobot产业应用
TM5-700
3D 视觉取物、组装贴标、取放、PCB 加工、PCB 检测取放、抛光& 去毛边品质检测、螺丝锁附。
TM5-900
3D 视觉取物、AGV组装、输送带追踪点胶& 涂胶、贴标机台操作、包装、焊接PCB 加工、PCB 检测取放、抛光& 去毛边品质检测、螺丝锁附。
TM12/ TM14
3D 视觉取物、AGV输送带追踪、塑料射出机台操作、包装、堆栈PCB 加工、PCB 检测取放、抛光& 去毛边螺丝锁附、焊接。
TM16/ TM20
3D 视觉取物、AGV输送带追踪、塑料射出机台操作、包装、堆栈取放、抛光&去毛边螺丝锁附、焊接。
无视觉版本机器人
无内建视觉版本手臂适合有特殊需求的使用者自行整合外部视觉系统,还可参考TM Plug&Play挑选已经通过达明机器人验证的外接相机,节省整合时间。
移动式机器人系列
移动式机器人系列可兼容几乎所有品牌的AGV/AMR,搭配内建视觉与 TM Landmark功能,非常适用于移动式堆栈、机台上下料或其他要求手臂拥有机动性的应用。
达明机器人的应用优势
取放料应用 (Pick & Place)
*使用TM Landmark,弹性布置手臂与周边位置
*2D Vision,高定位精度,重复误差 0.07±0.02mm
*3D Vision ,支持散乱堆栈取料应用、非平面物体定位
*无需围栏
自主移动机器人AMR
*使用TM Landmark,智能补偿自走车辆到定位的重复误差
*M 系列, DC 电源输入,易于AMR 整合
*智慧堆栈 (Smart Palletizing)
*使用TM Landmark,加速定位来料位置
智慧堆栈 (Smart Palletizing)
*2D Vision ,来料不固定与分类
*支持同时2 种箱堆栈, 换栈, 解栈
*整合立柱控制最高可以堆到2.3m
焊接应用 (Welding)
*TMflow用户接口让焊接教导更简单
*简单操作,手拉直接教导,程序自动生成路径,数分钟内即可开始焊接作业
*焊接专用的参数设定页面,包含电压/ 电流/速度/ 摆弧等常用功能
*拥有焊机专用设定接口,可快速设定手臂与焊机间的通讯控制,支持市面上常用焊机
餐饮应用 (Food & Service)
*使用TM Landmark,弹性布置手臂与周边位置
*与人协作,无需围栏
*AI Vision,非规则物体( 如章鱼烧) 的辨识、品质检测
AOI 检测 (AOI Inspection)
*AI & 机器视觉,支持条形码读取、文字识别、组配有无、量测、瑕疵检测等应用
*使用TM Landmark,弹性布置手臂与周边位置
*2D & 3D Vision,补偿来料定位误差TM Image Manager,图像储存与检索,建立产品数字履历


