







近日,有消息称国网电力发布《2026年具身智能发展规划》,计划在今年集中采购各类具身智能设备约8500台,总投资约68亿元,其中人形带电作业机器人为单价最高品类,采购数量500台,预算金额25亿元。而具身智能企业深谋科技的人形机器人已于去年9月中标国网河北电力能源技术公司《电力设备智能带电检测机器人系统》项目,目前业界首个特别针对电力行业的中高压变电站和配电室智能带电作业场景定制化开发的人形机器人“伏安”,即将交付国网电力。
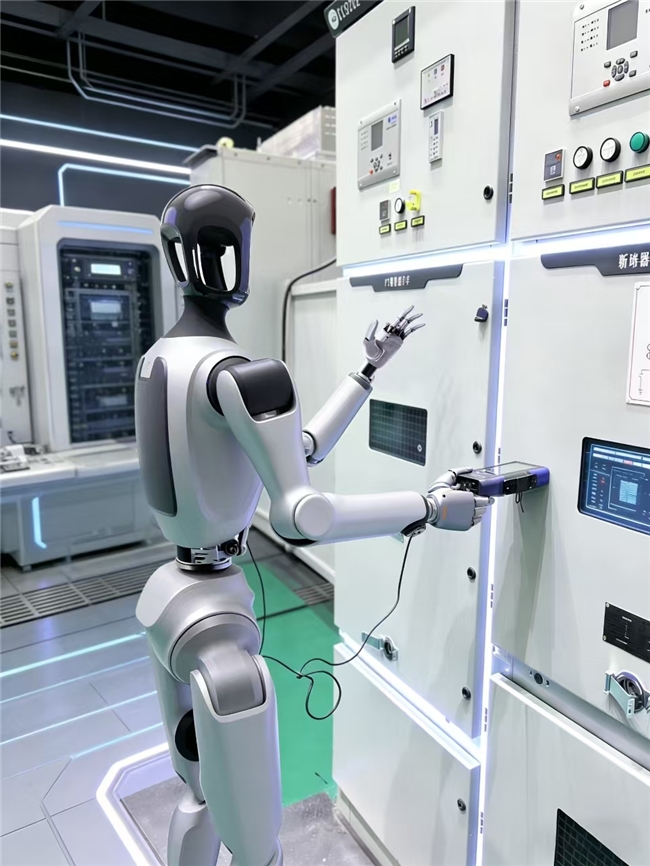
深谋科技,凭借6D动态视觉与力位混合控制技术、多模态传感与跨模态数据AI大模型融合技术、压电式六维力传感器、抗强电磁干扰的轻量化灵巧手中标国网电力,成为业界首个满足电力设备智能带电检测这样要求高、环境严苛、但价值更高的场景需求的人形机器人企业,为国网电力定制化开发名为“伏安”的智能带电作业人形机器人整机及相关核心零部件。

该项目旨在提升电力设备运维效率与安全,推动行业数字化智能化转型升级,减少人员进入高风险区域,要求长时间、连续带电作业、地形适应能力强,利用人形机器人代替人类及传统机器人覆盖范围小的劣势,实现智能带电检测全覆盖。
项目难点包括:融合多模态数据检测的机械臂-抗强电磁干扰的灵巧手装置研制、基于位姿-力传感器耦合的检测点位精确定位技术、建立基于大模型和多模态融合的实时数据分析、缺陷诊断和故障预测管控平台等等。
针对上述技术难点,深谋即将发布的业界首个智能带电作业人形机器人“伏安”,具有如下特别针对智能带电检测场景设计的技术和产品优势:
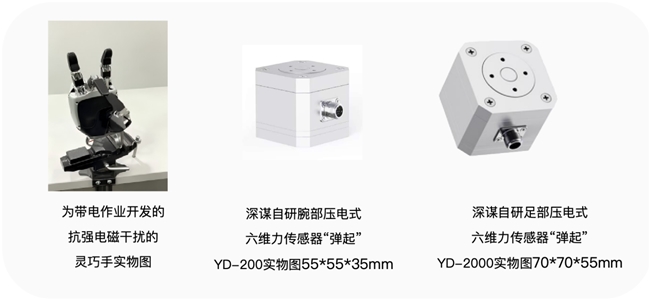
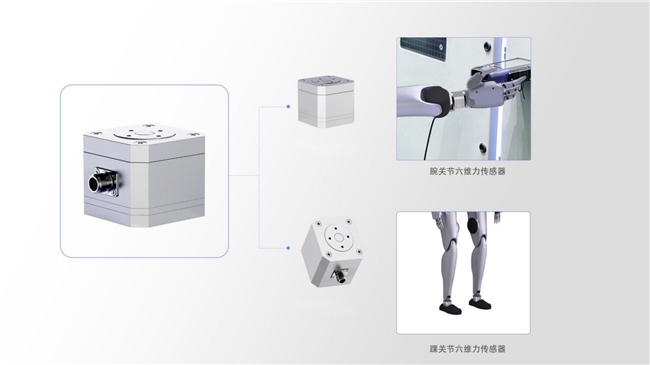
① 专业性电力带电检测末端执行器:抗强电磁干扰的轻量化灵巧手设计与模块化工具适配,完成传感器精准抓取与检测点位可靠贴敷。
② 高精度动态力位混合控制系统: 在复杂环境中多自由度机械臂的实时无碰撞轨迹规划能力与高精度力位混合控制,力位混合控制通过高动态六维力实时传感反馈,确保力控精度,同时兼顾位置精度;通过大量协同操作数据优化调度机制,将在实际变电站环境中反复测试,确保轨迹规划的鲁棒性与安全性。
③ 高鲁棒性自适应多模态数据采集融合定位算法: 克服了机器人位姿偏移、传感器插接偏移及设备表面曲率扰动等多种不确定性,融合多模态数据,构建了通用型定位体系来处理高维数据的高效融合与实时计算;以自适应算法适应复杂操作场景,建立了多模态操作数据库实现算法鲁棒性,实现从定位到数据采集的全流程闭环作业。
④ 基于AI大模型注意力机制的跨模态感知技术和实时故障风险预警机制: 采用AI大模型训练处理跨设备、跨工况的历史故障数据,构建多物理场耦合故障图谱,克服数据异构性和稀有故障样本不足问题;引入协同注意力Co-Attention机制融合多模态数据,严格控制计算时间的同时优化提升跨模态相关性;以动态预测模型实时生成概率化故障风险预警,融入电力模型约束,确保预测精度与实时性;通过RL强化学习算法优化大模型训练与多模态数据融合的实时缺陷诊断与故障预测。
⑤ 高安全性的复杂环境机器人运控与防护策略: 实现复杂地形通行,全景感知和智能避障。急停响应时间≤0.1秒,设备自检覆盖电池、网络、传感器等模块,符合IP67防护等级;支持闭门器自动开关,与开关柜门和挡鼠板无缝集成。
深谋科技在世界人工智能大会等场合多次发表观点,认为人形机器人应该摆脱“跑跑跳跳、图个热闹”的怪圈,不应该在“人形机器人从1973年诞生以来就一直热衷于在固定结构化的场景中表演”这种说不上有多创新的形式上耗费大量资源精益求精,而应该从对不同动态环境的多模态物理量感知出发,融合高速发展的人工智能技术进行自主决策与控制,与电力、能源石化等对场景有极高要求的高价值垂直行业相结合,真正满足行业刚需,为人类创造价值,才是这一轮人形机器人浪潮与上世纪80年代到本世纪初的前几轮人形机器人热的不同之处,也才有可能实现这次具身智能大潮万亿级市场的产业期待。
这些观点正获得越来越多关注,今年以来,中央电视台大型纪录片《强国智造》以“跳出舞台的机器人使命”特别报道了深谋,新华网以“用硬核技术和真实场景,推动具身智能创新发展”为题专访了深谋科技联合创始人郑如萍,新华社以“新质生产力 强国智造| 深谋科技:以智能感知技术,赋予机器人实干使命”介绍深谋。
央视《强国智造》纪录片中这样描述深谋科技的机器人使命:“在那些人类不愿、不能、甚至不敢涉足的角落,我们真正需要的,是能够推开门、走上前,用精准的感知去判断、用可靠的决策去行动的伙伴。” 电力带电作业场景无疑与这样的机器人使命高度吻合。

从前年率先提出研发“能够分时间维度提取因果和物理关系的通用具身智能世界模型”,到去年WAIC(世界人工智能大会)前夕首创与人形机器人结合的脑机交互系统MindMover,随后工信部等七部委发布了《关于推动脑机接口产业创新发展的实施意见》,再到去年人形机器人中标国网电力,早于业界预判到电力行业带电作业等高价值场景需求,有针对性地开发出首个智能带电作业人形机器人“伏安”,交付国网电力部门。 深谋科技不盲目跟风,不在同质化的形式上内卷,却在“乱花渐欲迷人眼”的具身智能赛道,一次又一次提前道破天机,引领方向,正成为以需求为导向,深耕硬核技术,为行业创造价值,实现商业化落地的具身人形机器人代表性企业。
人形机器人下半场的关键在于如何实现商业化破局,谁能笑到最后成为真正的执牛耳者,我们拭目以待。
(文中伏安机器人整机图片根据其实际结构设计渲染而成,最终产品形态以发布时为准,核心零部件均为实物照片)


