







并联机器人具有刚度高、速度快、柔性强、重量轻等优点,与串联机器人一起构成工业机器人的重要部分。近几年,随着并联机器人在食品、医药、电子等轻工业中的广泛应用以及在物料搬运、包装、分拣等方面无可比拟的优势,已成为工业机器人需求增长的新生力量。
中国科学院宁波材料技术与工程研究所先进制造技术研究所精密运动与先进机器人团队最新设计的四自由度并联机器人,可以实现3T1R四个自由度的运动,是少自由度并联机器人的创新设计之一,其主要特点为2条相同支链通过被动转动副连接到动平台上,且每条支链有2个相同分支通过安装在基座上的移动副作为驱动。为进一步分析机构特点,采用螺旋理论验证了该机构自由度的数目及机构的运动学特性,得到了其位置的封闭解,根据机构的运动学特性和构型特点,该机构位置正解的封闭解最多有8组解,位置反解最多有4组解,结果表明,运动学分析简单是此并联机器人的特点之一。此外,具有构型对称、工作空间大、速度快且定位精度高的特点。相比于传统的并联机器人而言,它能够实现XYZ三个方向的运动与一个绕Z轴方向的转动,且在驱动方向工作空间可依作业需求扩展,增大了工作空间的范围。
该并联机器人样机的每个支链采用了一定子两动子的高精度直线电机作为驱动机构,结构简单且电机定位精度达到微米级,此外,通过高强度的碳纤维复合材料作为支链的主要材料,有效降低了移动件的重量;控制系统采用了ABB的驱动器,通过PowerLink总线进行同步控制;通过基于运动学的离线轨迹规划算法,该机构的运动学目前该样机可达到XYZ三个方向的平动及绕Z轴方向的转动,移动范围分别是0.3m、1.2m和0.2m,其最大运动速度达到了1.6m/s,末端定位精度约为1mm,绕Z轴方向的转动可以达到±120°,能够广泛应用于柔性化工厂的包装、分拣等工序,具有很好的应用前景。
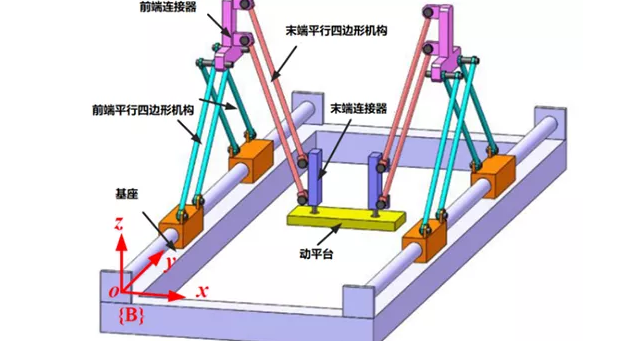
四自由度并联机构结构图
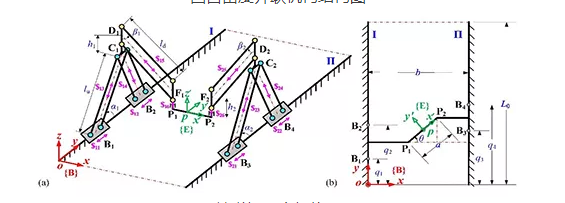
并联机器人机构图
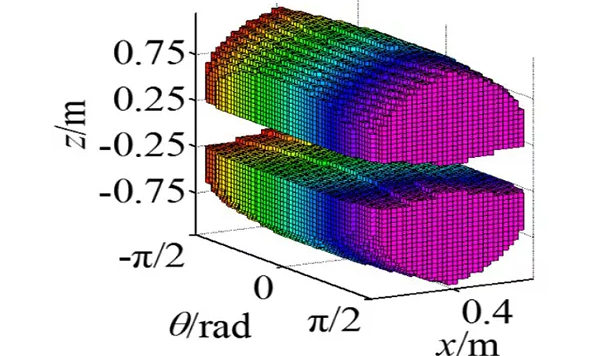
并联机器人工作空间


