









我们都知道,人类有学习的能力。由于人类不断的追求学习和进步,我们今天才处于一个美好的文明社会。百科上是这么定义学习的:学习是通过阅读、观察、实践等手段获得知识或技能的过程,是使得个体得到持续性变化的行为方式。
在工业革命过后,关于机器学习的话题不停被人们提及和研究。
不难想象,具备有学习能力的机器人,由于经验可以被无穷无尽的芯片储存,机器人做出的判断将越来越精准,犯错的几率也将趋于零。正因为这些优势,机器学习被应用在了高级的、复杂条件下的视觉识别、决策判定等领域。
最近,某著名手机品牌又火了一把,它可以通过摄像头,识别人脸并完成解锁手机等功能。有趣的是,不管主人造型怎么变化,它都能认出主人的脸。

人脸视觉识别
实际上,该手机搭载有神经网络芯片,通过机器学习,它能不断的记住主人在每个造型下的微小区别(积累经验)并进行横向对比,最终它将基本不会认错人。
同样的,在 RoboMaster2017 的赛场上,有着一个九宫格大能量机关。这是当前版本的赛场中,唯一需要用到机器学习式视觉识别的人工智能机关。
击打大能量机关
激活机关的过程有些复杂。机器人先要识别上方的 LED 数字灯,按照先后顺序,依次识别并击打下方每 1.5 秒就变换一次位置的手写体数字,连续 5 次击打成功即可激活机关。
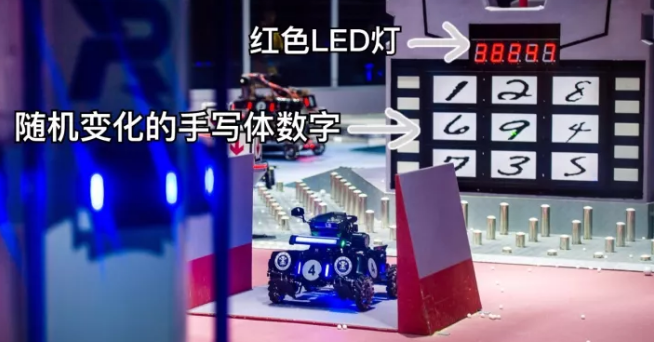
大能量机关
我们来看下这个机关的难点:上方数码管为有序、随机变化的固定形态数字,下方九宫格为每 1.5 秒随机变化位置和字体的手写体数字,1.5 秒内只要错了一个就要重头开始。手写体数字举例如下:
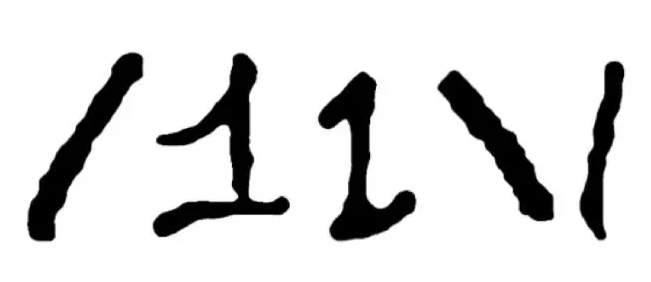
各种形态的数字 1
面对各种字体的数字一,若按照上一期的传统视觉方法来识别,机器人需要将这五种情况“背下来”。但是,万一比赛出现了第 6 种数字一,机器人就会彻底蒙圈了:“这是啥?没见过,不认识。
通过上面两个例子,我们可以知道,RoboMaster 赛场中的大能量机关属于更高级的、复杂条件下的视觉识别难题,需要用机器学习来解决。
机器人具备机器学习的能力,实际上是在说它的计算机程序具备机器学习的能力。
一个计算机程序不断地实战,过程中不断累积经验,自己提高解决问题的能力,则认为该程序具有机器学习能力。简单说,就是丢给机器一大堆样本范例,让它自己学习理解,再举一反三,解决范例以外的问题如果是经过机器学习训练的机器人呢?只要训练得当,哪怕萝卜君变异成白萝卜,变成炒萝卜丝,都逃不过它的法眼,一眼看穿!
要想让机器人能通过程序学习,首先需要搭建机器学习系统的架构。前人栽树,后人乘凉。对于初学者来说,大部分常见的架构都是搭建好的,有些甚至只需要在软件中敲入几行代码就能完成一个机器学习系统的搭建。由谷歌开发的 TensorFlow,在机器学习研究领域中较为主流,其代码质量高、成熟度高。


