





3月5日,由移动机器人产业联盟、人形机器人场景应用联盟主办,星工聚将冠名的“2026具身智能移动机器人(EIMR)探索者论坛”在北京举行。在本次论坛的重要环节中,星工聚将正式发布了具身智能轮式人形机器人新品——XG Z1轮式机器人,并首次对外披露多项核心技术细节。

当前,具身智能正从算法研究走向产业实践,成为推动机器人产业升级的重要方向。此次发布XG Z1轮式机器人的星工聚将,正是这一领域的先行者之一。
作为一家融合前沿人工智能与机器人硬件的创新型科技公司,星工聚将始终以“智驱中央脑,引领具身智能无限生长”为核心理念,致力于打造赋能千行万业的通用机器人,重塑人机协作范式,引领生产力新纪元。

图:星工聚将创始人 李梓正
在论坛现场,星工聚将创始人李梓正进一步阐释了公司的战略愿景。他表示,星工聚将希望成为首家实现“具身智能在工商业场景规模化应用”的公司,并以“智驱具身进化,引领无限生长”为使命,将探索、生长、普惠、担当作为企业核心价值观,持续推动技术从实验室走向真实场景。
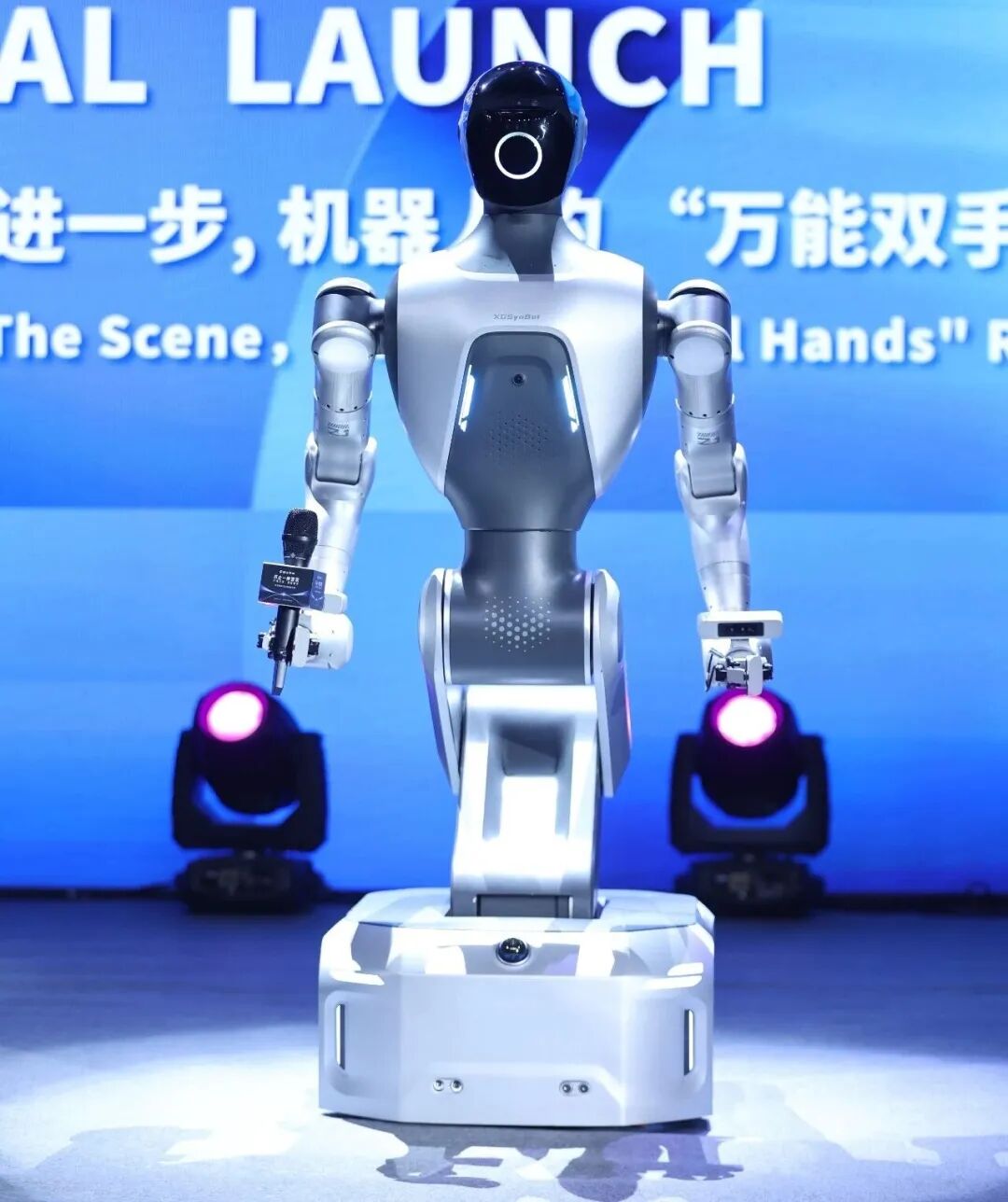
此次亮相的XG Z1轮式机器人,正是这一理念下的最新成果。现场,星工聚将技术负责人陈牧带来新品的深度解读,XG Z1轮式机器人以“中央脑”为核心驱动力,集成了超轻力控机械臂、全向底盘与多路视觉系统,可以实现跨工位、跨场景、跨任务的通用具身智能。

图:星工聚将技术负责人 陈牧
在硬件结构上,XG Z1轮式机器人整机收拢状态外形尺寸为 735×642×1320mm,重量约130kg,在保证稳定性的同时兼顾机动性。该机器人整机采用24自由度设计,并且配备±180旋转可折叠躯干结构,使机器人能够在复杂空间中实现更大的作业范围和更灵活的操作。
基于这一灵活的本体,XG Z1轮式机器人展现出强大的作业能力。其作业范围覆盖上下约200—2200mm、左右0—1900mm以及前向0—600mm,可满足工业与服务场景中多高度、多角度的作业需求。
在操作能力方面,XG Z1轮式机器人末端兼容电驱快换设计,适配10多种末端执行器,可实现6秒切换。这意味着一台XG Z1轮式机器人能够在不同场景之间灵活切换,例如在生产线上完成物料搬运、在仓储环境中进行分拣操作,或在商业零售场景中执行辅助服务任务,实现“一机多能”。
而支撑这些复杂动作的,是星工聚将自研的高性能关节模组。该模组采用谐波减速机与无框电机一体化设计,支持在线可变速比调节,能够兼顾低速重载与高速轻载的双重需求,扭矩输出范围覆盖45~1500牛米,是其他同类型关节模组刚性的两倍,可灵活适配多种人形机器人的需求。这一核心零部件的自研突破,标志着星工聚将在底层执行部件上实现了自主可控,也为后续产品迭代奠定了坚实基础。
算力平台则是XG Z1轮式机器人的重要技术亮点之一。该款新品拥有高计算性能,支持最高2070 TOPS算力,可兼容从传统运动控制算法到前沿大模型部署的全栈AI需求。这一架构不仅能够支持机器人当前的操作与感知任务,也为未来实现持续智能进化提供了空间,使机器人具备不断学习和适应新任务的能力。
在感知与安全能力方面,XG Z1轮式机器人搭载360多模态感知系统,可实现毫秒级主动避障。在人机协作环境中,机器人能够实时识别周围人员和设备,动态规划运动路径,从而提升协作安全性和作业效率。这一能力对于仓储物流、智能制造以及商业服务等复杂环境尤为关键。
正是以上诸多技术维度的协同,赋予了XG Z1轮式机器人极强的场景适应能力。无论是仓储物流、3C电子行业,还是汽车制造,乃至医用实验、科研教育及商业零售等领域,XG Z1轮式机器人均可凭借其通用本体与“中央脑”的协同,快速切换角色,成为真正的“实干家”。
2026年,具身智能移动机器人正成为推动产业智能化升级的关键力量。其中,具身轮式人形机器人凭借高度的适应性与交互能力,在智能制造、智慧物流、人机协作等场景中展现出广阔应用前景。此次XG Z1轮式人形的正式发布,不仅是星工聚将践行“智驱具身进化,引领无限生长”使命的关键实践,也标志着具身智能从技术探索迈向真实场景落地的进程进一步加快。
面向未来,星工聚将以“专用切入、多工序扩展、通用进化”为战略路径,逐步推动机器人从单一任务走向跨场景应用。通过自研“中央脑”,基于一体化架构平台,打造能够在工业、服务业等多个场景自由切换的通用机器人。


