







导语
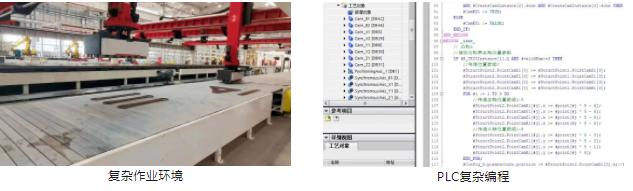
随着智慧工厂的广泛建设,桁架机器人在制造、物流等环节中的作用日益凸显。当前大部分工厂仍采用传统PLC(可编程逻辑控制器)来控制桁架,仅能实现简单场景下的桁架运动控制功能,难以支持复杂作业环境以及动态任务场景下多臂桁架机器人的灵活高效控制。且PLC编程开发周期长、成本高、调试难,无法实现快速交付。
针对以上亟待解决的难点,视比特机器人推出了国内首款多臂智能桁架机器人控制器——SpeedTruss,以最优运动规划突破传统桁架自由度限制,实现了多臂共轴桁架机器人在复杂环境、复杂任务下的自动规划、主动避障、敏捷执行,适应全场景柔性生产需求;同时支持低代码灵活开发,极大地简化了开发流程,大幅缩短了投产周期,为工厂智能化水平和生产效率的提升带来质的飞跃。

SpeedTruss VS 传统PLC
1.PLC在控制桁架柔性作业时遇到的挑战
1)在面对动态任务(如多SKU物品分拣)或场景变化(如遇到障碍物)时,桁架运动柔性程度低,需修改程序或重新调试来适配现场需求,开发及调试周期长、成本高。
2)多臂协同作业时,机械臂越多,控制难度越大,易发生不同臂相互干涉、冲突(如碰撞)等问题,从而影响生产效率,需人为编写复杂的程序来调整。
3)桁架控制过程缺乏直观的可视化工具,操作及调试难度大。
2.SpeedTruss智能桁架控制器的优势

1)搭载自研最优运动规划技术,实现桁架自动控制与智能协调,免示教、自动规划、主动避障,可胜任各种高难度空间作业,无需重新编程。
2)多臂共轴无碰运动规划,实现多臂桁架机器人在共享工作空间内高速无碰、灵敏作业,无需人为干涉。
3)在线优化任务分配,实时调整任务执行顺序,实现更高效作业。
4)三维可视化界面,生产信息实时监控,所见即所得。
5)开发灵活、操作简便,省时省心,用户使用更便捷。
SpeedTruss全解读

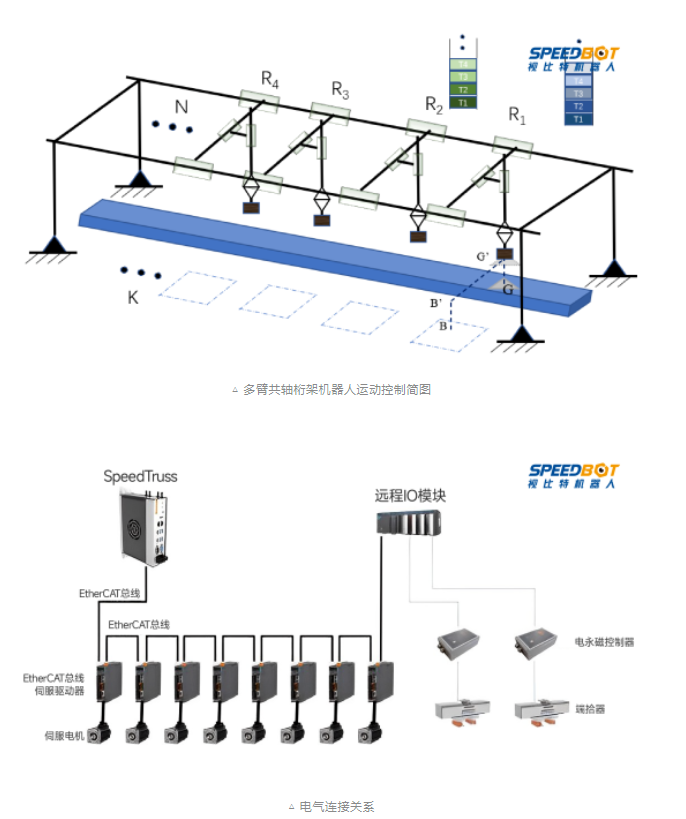
SpeedTruss智能桁架控制器主要用于多臂共轴桁架机器人(N≥1)的运动控制,运用自主研发的桁架运动规划、多臂协同运动控制、无碰运动协调等算法技术,为智能产线提供灵活、精准、高效的多臂桁架运动控制方案。用户只需调用控制器提供的高级任务指令接口(如将某台桁架臂移动到目标位置K),即可实现对桁架机器人运动轨迹的自动控制与协调,保障各个桁架臂高效无碰协同运动,有效提升生产效率。
1.最优运动规划,无需人为示教
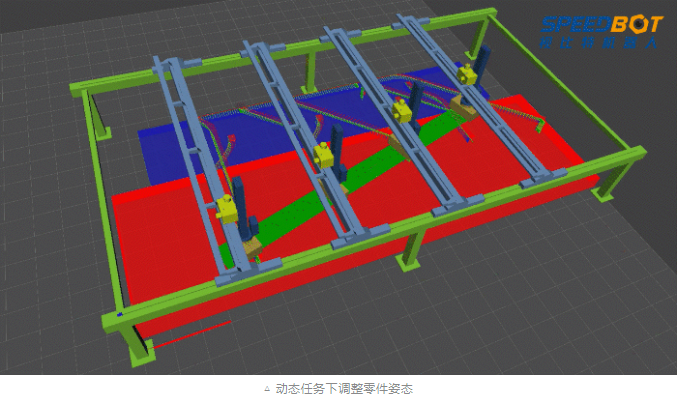
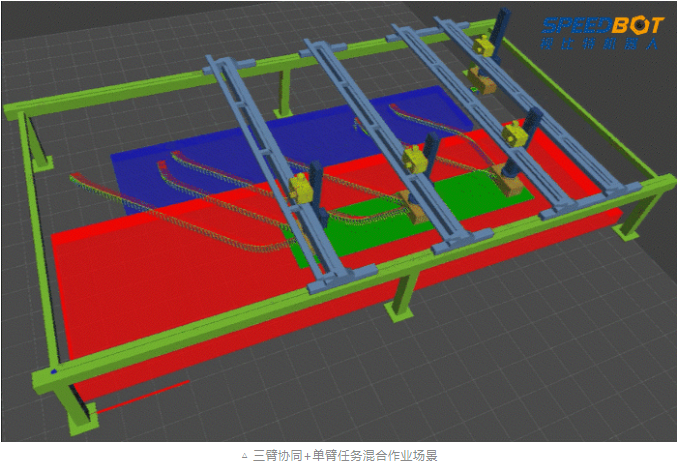
SpeedTruss智能桁架控制器建立了轨迹规划、多臂协同、无碰运动等多种算法相结合的桁架臂最优运动规划方法,可进行单臂任务、多臂协作任务以及单臂与多臂任务混合场景的桁架运动轨迹的规划。
·针对动态任务场景,以基于几何约束的轨迹规划算法,有效解决了因任务变化(如桁架搬运场景中抓取物体尺寸的变化)导致的不同臂运动干涉问题,保障设备安全作业。
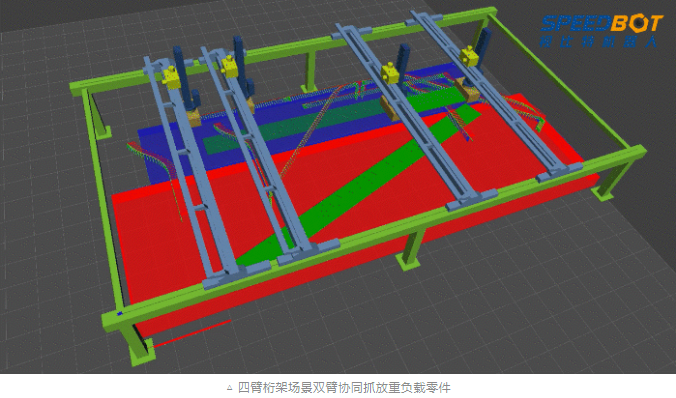
·针对多臂协同作业场景,自研多机无碰路径规划与协调算法,通过精确计算桁架机器人各个臂的无碰运动轨迹,并最大化地调度各个桁架臂同时运动,实现多臂桁架高速、灵活作业。
·针对高速重载场景,自动计算桁架臂各个关节平滑运动的速度曲线,实现桁架自身速度和加速度的精准控制,保障桁架平稳高速运动。
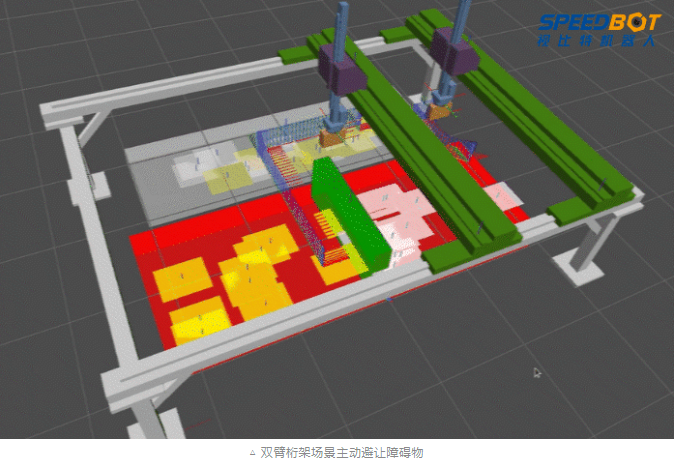
·针对存在障碍物的作业场景,自动规划桁架臂避障运动路径,无需人为示教避让点,轻松实现桁架机器人主动避障。
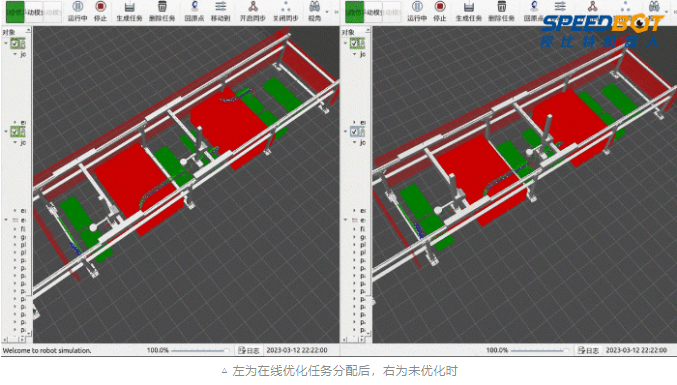
2.在线优化任务分配,整体效率提升20%~35%
在多任务场景下,桁架机器人存在多个共轴的机械臂,不同臂在工作空间内的任务时序直接影响整体作业效率。SpeedTruss智能桁架控制器建立了基于时空约束的最优任务分配模型,最大限度地提高工作效率。
· 通过AI强化学习实现在线优化任务分配,智能调度复杂空间下的任务分派,并自动选择最优桁架臂进行任务执行。
·通过在线优化与决策,实时调整任务执行顺序,相较PLC等传统控制器,SpeedTruss将桁架系统的整体作业效率提升了20%~35%。
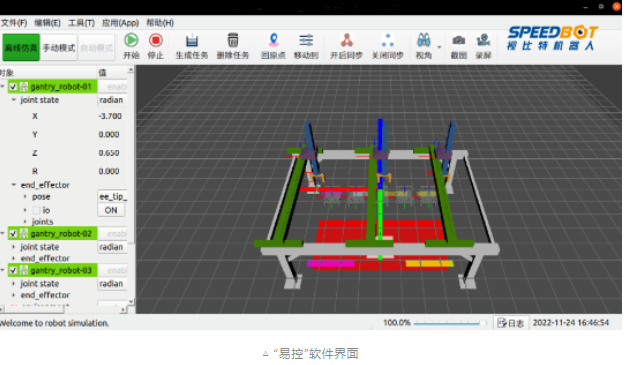
3.三维可视化,所见即所得
SpeedTruss智能桁架控制器软件系统——“易控”提供三维可视化窗口,轻松实现关节点动、回原点、三维场景可视化与编辑等功能。
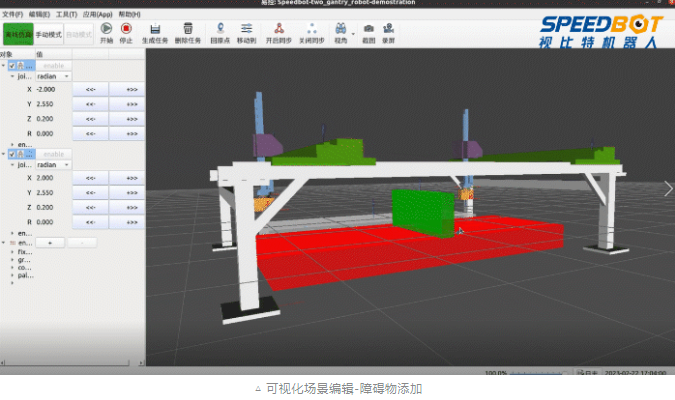
· 三维显示桁架臂当前运动状态数据,包括实时位置、几何关系、障碍物等。
· 可视化场景编辑,用户可在界面状态栏中进行障碍物方位的修改、移除或添加,实现对桁架机器人的柔性控制。
· 支持同步更新,便于前期方案的验证与部署过程中的调试,在实际生产运行时方便用户进行直观操作,快速应对柔性生产需求。
4.开发灵活,操作简便
在使用SpeedTruss智能桁架控制器时,用户只需在软件中调用任务指令接口即可实现相应功能,无需进行额外的开发工作,轻松实现多臂桁架机器人的柔性运动控制。
·用户可自由选择操作模式——在线控制或离线仿真。
·在线控制状态下,系统实时监测桁架控制运行状态,轻松控制桁架机器人多臂无碰运动。
·离线仿真模式支持虚拟场景构建,从而验证方案设计阶段桁架臂的可达性、数量等设计参数是否达标,实现入场前提前发现问题、解决问题,随时随地调试优化,可大幅缩短投产周期,实现快速交付。
SpeedTruss应用情况
SpeedTruss智能桁架控制器以功能强大、开发灵活、操作简便等优势在重工、物流等领域多家龙头企业实现批量落地。相比传统PLC,在实现复杂环境、复杂任务下多臂桁架协同运动、灵活作业的同时,使桁架整体作业效率提升了20%~35%,全方位推进工厂智能化升级以及降本增效。
在重工制造业钢板切割件分拣场景,来料零件重且规格多样、作业空间跨距大、生产环境复杂,难点在于桁架高速重载运动以及多臂无碰协同作业的控制。国内多家重工龙头企业生产线采用SpeedTruss智能桁架控制器进行多臂桁架的智能调度与协同作业,实时规划最优运动轨迹,主动避障、多机无碰、高效作业,轻松完成了上万种钢板切割件的柔性拣选。

在物流行业,大尺寸轻型板材物料的运输与分拣一般需由桁架机器人完成,其难点在于大跨距、轻量化作业环境下桁架运动速度与稳定性的平衡。某知名物流系统集成商橱柜板材分拣项目采用SpeedTruss智能桁架控制器,自动控制双臂桁架机器人执行拣选、差数配板(反拣)、余料回库等任务,在多任务类型混合场景、物料尺寸变化场景适应性强,全自动、精准、快速地完成了橱柜板材、垫板海量SKU的分拣与码垛。

关于视比特机器人
视比特机器人成立于2018年,是一家专注于AI机器视觉及工业智能软件的高科技公司,致力成为工业智能赛道的持续开拓者与领航者。总部位于长沙,研发总部位于上海,在天津、宁波、贵阳、加拿大、塞尔维亚、捷克、东南亚等地设立了办事处。
公司围绕“软件定义工业智能”,凭借自主研发的3D视觉算法、机器人柔性控制、手眼协同融合、多机器人协同、工厂级智能规划与调度等核心技术,打造面向敏捷开发、可视测试、快速部署、持续运维的“数字孪生+云原生”工业智能软件平台,为客户提供系统级软硬件一体解决方案,加速各行业智能产线和智慧工厂的落地应用。
公司首创的重工业钢板切割智能下料分拣产线已在多家龙头企业规模落地应用;汽车行业大尺寸高精度在线测量专机系列打破国外长期垄断,已成功交付全球多家汽车主机厂及零部件龙头企业;物流行业动态分拣机器人在食品、电商、医药、快递物流、仓储物流等领域大面积交付使用,在行业中享有良好口碑。
成立以来,已完成6轮融资,天使轮由图灵创投领投+道生资本跟投,战略轮由同威资本领投,A轮由和玉资本领投,A+轮由中金资本领投,B轮3亿元融资由经纬创投领投。同时,公司在科技创新、产业应用、社会贡献方面受到各界关注和认可,已获国家高新技术企业认定,荣摘国家科技部2021年度全国颠覆性技术创新大赛优秀项目、2021年科创中国新锐企业奖等众多奖项。


