




今年爆发的疫情打乱了制造业的整体节奏,很多制造企业面临“物竞天择,适者生存”的局面,不得不寻找企业生存和变革之路。疫情影响下,企业面临复工率低、人员短缺、人员集中风险、项目现场部署受限等诸多困境,促使企业快速推进“机器换人”的步伐,并启动数字化和智能化革新。无人叉车和AGV/AMR将在工业生产领域越来越广阔应用,市场空间也将进一步扩大。
无人叉车、AGV/AMR可解决劳动力短缺、人力成本提升、人员安全隐患和效率低下的诸多实际问题,同时可以为企业实现降本增效,提升企业的竞争力和抗风险能力。本次疫情促使很多企业深刻意识到无人叉车、AGV等自动化物流设备在工业物流领域的重要性和必要性。
BITO通过领先的AI算法、视觉感知、机器人软件架构和电子硬件控制等关键技术,赋能无人叉车、AGV/AMR 自主化和智能化,并配备自主研发的BSLAM激光自然导航系统、BANS单机控制系统和BFMS多机调度系统,为客户提供完整的智慧物流整体解决方案。
BITO无人叉车解决方案案例分享
项目概况:
日本某金属工业会社为国际知名的大型快消品企业服务,其仓库管理方面人力成本逐年提升,且货物摆放不规则,仓储空间利用率低,仓库内物流运输效率有待提升,针对其仓库货物摆放杂乱、高度不固定的货物存储位置和人力成本降低的需求,BITO提供了满足其特殊需求的定制化自然激光SLAM导航叉车解决方案,实现了视觉伺服矫正和高度不固定二层托盘插取的要求。
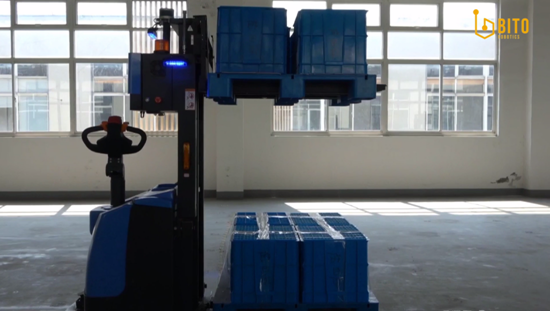
叉车二层栈板堆放功能展示
BITO解决方案:
BITO根据客户实际需求,定制了可以满足不规则二层托盘插取的叉车,以实现客户现场需要存取高度不规则货物的需求,高效精准地完成仓库物流运输任务。方案配备了宾通自主研发的国际领先的BSLAM激光自然导航系统,让无人叉车可实时动态识别现场环境,行驶过程中保持定位精准,定位精度可达± 2 mm,同时采用BITO自主研发的BANS单机控制系统和BFMS多机调度系统,实现叉车建图定位、安全避障、自主运行、路径规划、任务调度、交通管理、状态监测、栈板托盘和货架识别等功能。
解决方案核心优势:
1.无需更换已有叉车和场地改造,大大降低改造成本
BITO采用自主研发的BSLAM激光自然导航系统和BANS单机控制系统,可适配市面上的通用车辆运动模型,并可快速导入叉车、AGV/AMR,完成车辆改造。
2.部署时间快,不影响客户正常生产
通过不断的产品验证、应用和迭代,采用BANS单机控制系统可在24个工作小时内完成对叉车、AGV/AMR的改造,并实现建图定位、安全避障、自主运行、状态监测、栈板托盘和货架识别等功能。
3.无缝对接MES、WM和ERP等系统,助力客户生产管理智能化和数字化
BITO的BANS单机控制系统和BFMS多机调度系统,可与客户现有的WMS、MES、ERP等系统无缝对接,并可与PLC、呼叫盒、光电开关、自动货梯设备联通,实现自动电梯出入和跨楼层搬运。
4.定制化开发,满足客户现场实际需求
可根据客户现场实际需求,提供定制化解决方案,如本次案例中涉及到的异常恢复功能、二层栈板堆放、视觉伺服矫正等,解决客户现实问题,为客户带来实际效益。

项目现场展示
客户价值:
实现了指定路线运行--从待机位置出发自主行驶到取货点,货叉取货后再行驶至放货点,结束后返回待机位置;
实现了自主判断位置矫正---到达取货点和放货点时,检测并判断货叉与托盘之间的位置,若有误,依照系统设定自行改变运行路线并进行位置矫正;
实现了自主检测栈板、托盘等位置信息--货叉上升、下降时均可检测栈板、托盘等高度位置信息;
实现了二层栈板堆放---自动识别一层栈板并判断位置,货叉取货将二层栈板堆放至一层栈板上。
通过为该企业提供定制化的高效精准的无人叉车智能化解决方案,智能化替代传统人工作业的模式,实现了仓库的物流自动化,帮助企业提高物流搬运效率,提升生产效率,节省人工成本,并助力企业实现内部物流智能化、柔性化升级。


