




作为专业的移动机器人整体导航解决方案提供商,浙江科聪智能目前已为业内各大主机厂、整机厂商及系统集成商的AGV、无人叉车和移动机器人等产品提供了自主导航软硬件核心零部件。显然,当前科聪在实现AGV核心技术国产化方面已经取得了一定的成绩。
实现核心技术的国产化
伴随着移动机器人的不断发展,从需求增长、进口替代、性价比等多个维度对国产零部件产生了巨大的期待和市场机会,但要想实现真正的国产化,并不容易,尤其是在机器人的导航模块方面,外资企业几乎垄断着主导市场。
从技术到市场,科聪在实现国产化目标方面做足了准备,科聪智能的核心团队从事工业自动化和AGV机器人相关技术和产品研发工作,已经有20多年时间了。此外,公司还依托浙江大学、清华大学和中国科技大学等国内高校平台,并在国际范围内与美国卡耐基梅隆大学、德国德累斯顿大学、慕尼黑工业大学、美国硅谷的人工智能技术团队达成了伙伴合作关系。技术实力深厚。
科聪相关负责人表示“我们拥有一支从事国产化产品产业化多年工作经验的团队,深刻理解国产化不仅仅是全自主知识产权,更要让国产核心技术与国人的使用习惯、国情的需要相互匹配,在科聪产品工业级可靠稳定的技术基础上,通过提升易用性,实现移动机器人核心零部件的国产化产业化路径。”
目前,科聪已掌握智能移动机器人基于多传感器融合的环境学习与精确定位技术、动态路径规划与精确轨迹跟踪技术、移动机器人多轴协同高效平稳控制技术、基于深度学习与智能云的数据挖掘技术、多智能体分布式协作技术、特种环境防护技术与本质安全防爆技术等一系列国内领先国际一流的技术。丰富的技术积累也为科聪打开市场奠定了良好的基础,目前,科聪与行业内各大AGV厂商和系统集成商均有合作。
可靠易用是控制导航系统的关键
随着工业技术的不断发展,各类移动机器人开始广泛应用于制造,物流仓储业、汽车、造纸等行业。如何更加简便合理的设计一个移动机器人,来适用于更多的领域,来抢占更多的市场?科聪认为,控制系统的可靠易用是关键所在,科聪在这两方面也做了系列努力。

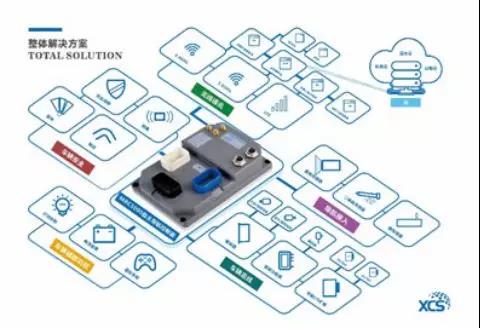
科聪智能自主导航控制系统,以MRC5000系列控制器为核心,配合MRC二次开发平台,以图形化方式快速开发出符合客户需求的各类移动机器人。MRC二次开发平台核心是机器人设计软件(xRobotStudio),是移动机器人整机功能开发和功能实现的专业设计软件。可以根据机器人不同的底盘结构,轮系的传动方式和驱动方式,以图形化方式简单、快速地实现机器人运动控制算法自适应匹配。
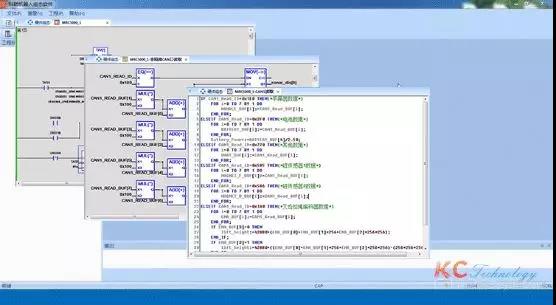
另外,软件提供符合IEC 61131-3标准,支持三种的可视化编程语言:LD(梯形图),FBD(功能块),ST(结构化文本)的图形化二次开发环境,可以对移动机器人控制器的各种输入和输出进行二次编程,快速实现不同的控制逻辑、应用功能二次开发。

而硬件方面, MRC5000系列控制器硬件包括功能强大且性能可靠的部件,可用于工业领域。所有部件都可以用于恶劣环境,能够承受日常操作过程中的振动、灰尘、潮湿以及温度变化。极高的工业环境适应性,系统连续10年无故障运行。通过热设计、降额设计,可适应-40~80℃的工作温度。采用防雷技术、信号电气隔离技术、干扰瞬态抑制技术,系统电源、通讯多重隔离保护和等电位设计。电磁兼容性达到工业III级标准、全产品CE认证。
在实现国产化道路上不断狂奔的科聪智能,能否给我们带来新的惊喜? 10月22日,在由中国移动机器人(AGV)产业联盟主办,《物流搬运机器人》杂志社 、新战略机器人产业研究承办的《砝石智能·第二届中国国际AGV机器人产业发展高峰论坛》上,科聪智能副总经理 王文伟先生将为我们分享“移动机器人控制技术现状与发展趋势”。


