







11月6日,2018亚洲国际物流技术与运输系统展览会在上海新国际博览中心正式开幕,作为物流自动化的关键部分,物流搬运机器人自然必不可少,这次展会又有哪些新品来袭?一起去看看吧!
新松
新松此次发布了三款基于最新激光轮廓导航技术所架构的移动机器人产品,相关产品具有快速部署,灵活高效等特点,无需对环境进行二次改造。

昆船

昆船新型智能分拣AGV,采用二维码导航方式,自主开发的调度系统可同时调度1000台AGV。
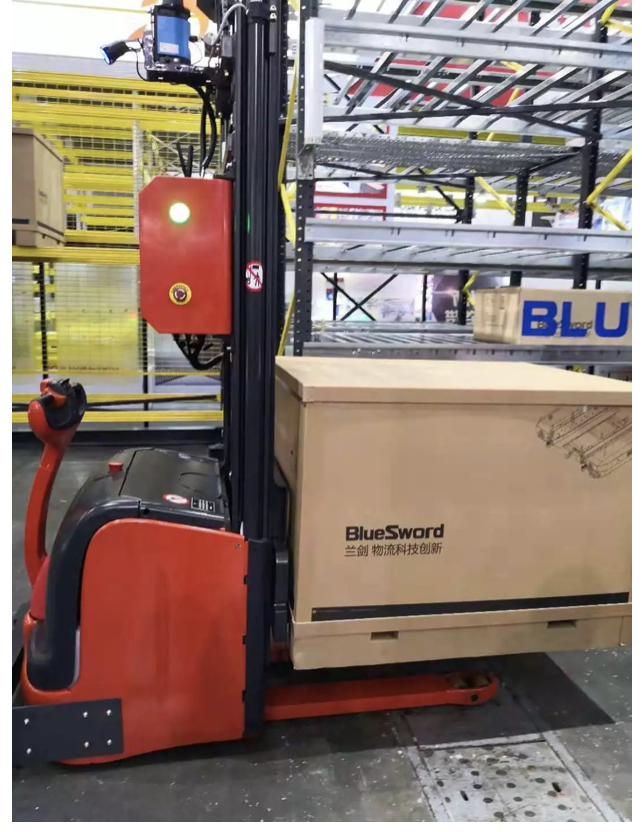
兰剑物流
兰剑此次带来的叉车AGV采用自主开发的激光导引,举升高度可达7米,载重1.5吨。
今天国际
今天国际自主研发的新品万向AGV能实现自动对接取货、搬运等操作,上位计算机通过WIFI下达指令,派遣小车到指定地点取货并运送至目标点。

合肥井松
井松除了其移动视觉导航AGV之外,还带来了新产品“全向前移式堆高AGV ”。此款堆高车的举升高度可达到8米。

艾吉威
艾吉威此次带来的是无标识激光背负式AGV,双舵轮全伺服驱动,可全向移动。

马路创新
马路创新本次展会推出新一代基于VSLAM技术导航的机器人产品,突破可调度机器数量(100+)、场地面积(5,000+)、定位精度(5mm)、运行速度(1.5m/s)四大瓶颈,无需地坪改造即可实现仓储物流高效运作

牧星智能
牧星携全新一代具有行业突破性的T3800智能机器人产品,采用二维码+惯导,运行精度小于10mm,载重可达800公斤。

科钛机器人
科钛机器人的激光导航顶升式AGV采用激光导航,利用激光导航优势实现高效灵活的动态避障和动态运动路径规划。
迦智机器人

EMMA200是基于2D激光导航的200公斤级室内通用自主移动机器人平台,采用了国际领先的无需激光反射板的自然无轨导航技术,载重可达200kg。
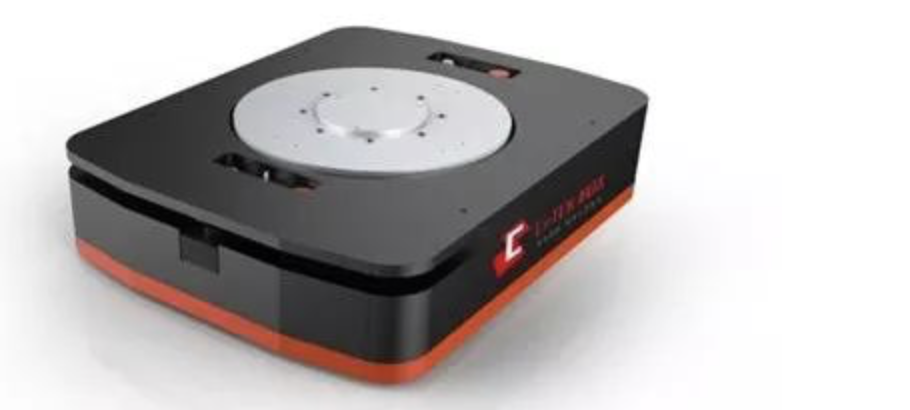
盈科视控

顶升搬运机器人小盈采用双轮差速驱动,自主研发机器视觉和控制器,可快速开发迭代。
极智嘉

极智嘉第五代智能物流机器人P800采用激光雷达避障,具有4m障碍物检测距离,机器人底盘重心距离地面仅270mm,额定负载800kg。
博众机器人

博众的IGV小车无需铺设磁条、磁钉等辅助标记,柔性化程度更高、更智能。
凌鸟智能

凌鸟此次带来了其备受关注的金丝雀系列L100,结构最紧凑的托盘堆垛AGV,自身重量只有120kg,载重1000kg,360°陀螺式原地转弯。
国自机器人

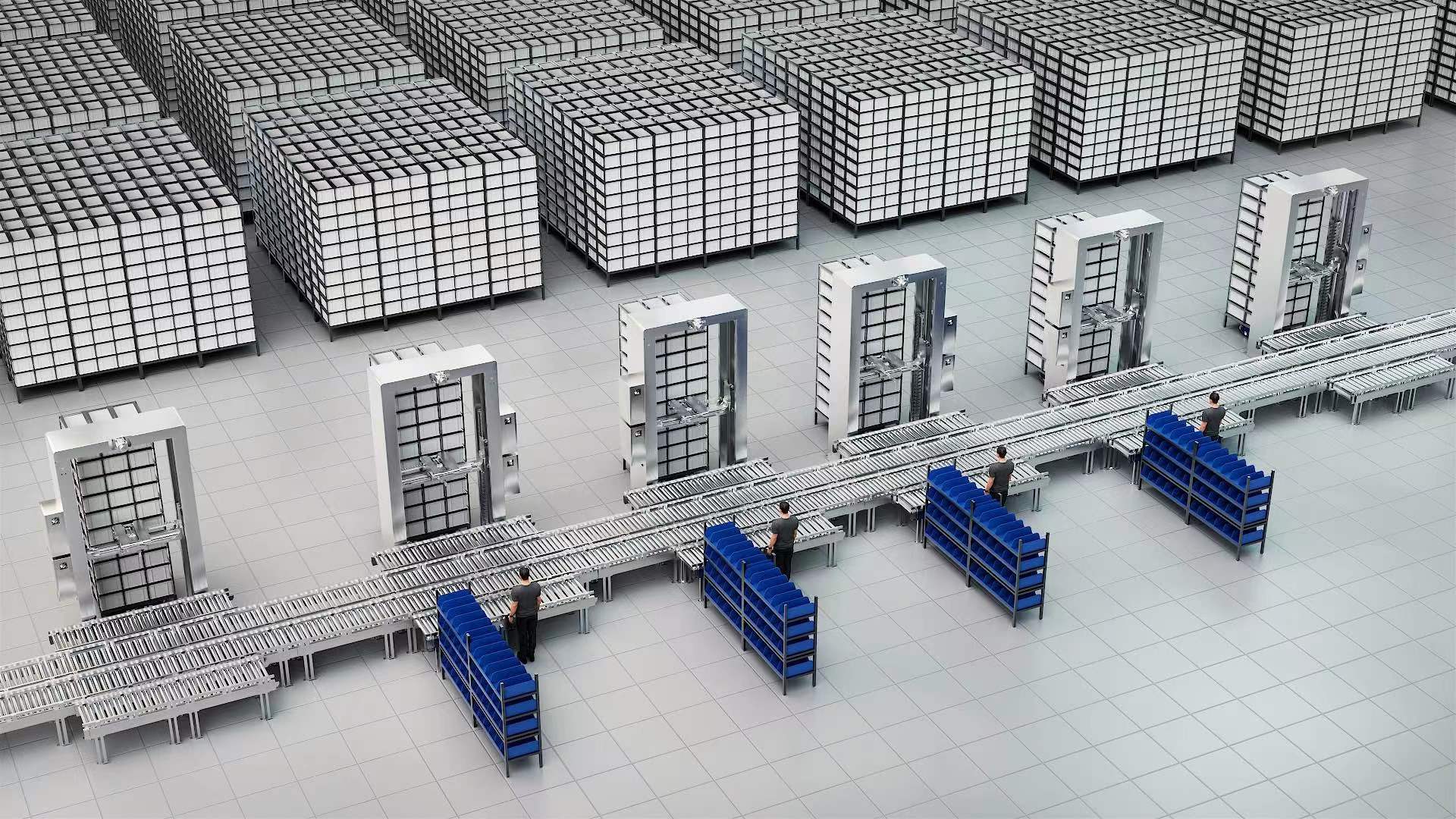
Picking AGV一次可收集至少5个目标SKU箱,可在3米高的货架上进行叉卸SKU箱。并具有一个自由旋转的装载平台,在叉卸货时无需转弯。
柯金

前移式叉车AGV加配侧移器可二次精准定位,可实现取放货精度为正负5mm,举升高度接近7米。
木牛流马

木牛流马二手堆垛车AGV升级解决方案,升级后具备手动、半自动、自动三种模式,采用激光导航,定位精度±10mm,行驶方向安全激光扫描仪+货叉传感器。
快仓

快仓机器人此次推出的叉车AGV采用激光导航方式,举升高度2.3米,载重2吨。
旷视艾瑞思

艾瑞思智能搬运机器人采用激光SLAM+视觉SLAM融合定位,导航算法能够适应复杂地面环境。
海康机器人

海康叉车系列机器人采用双轮差速驱动,原地旋转,前后激光,双层气动式碰撞条,光电声光报警,最大运行速度1.5米/秒。
东佑达

东佑达此次展会主推的是US驱动产品,可满足AGV10度的爬坡能力。
未来机器人
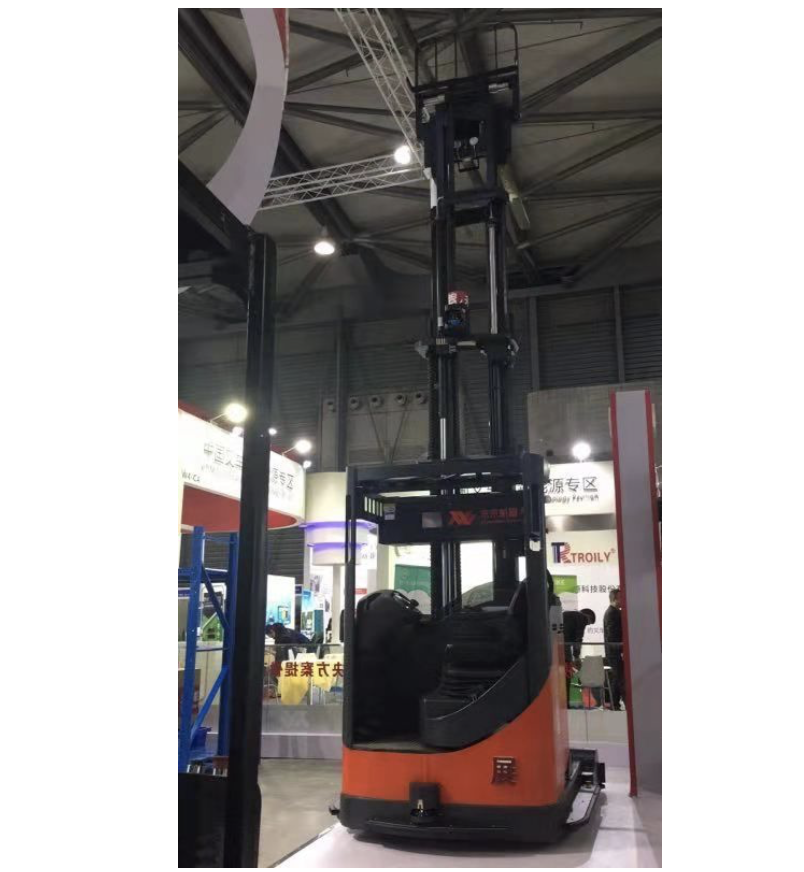
未来机器人视觉导航前移式无人叉车采用行业首创的自然环境视觉定位导航技术,最大提升高度9.4m,可高效完成流程化的高位取放货任务。
海通

海通SLAM自主导航iAGV,利用SLAM导航定位的优势,自主构建环境地图,柔性更高,同时具有良好的拓展性。
怡丰

小精灵采用视觉传感器作为AGV的眼睛,通过地面自然特征即可实现高效的定位导航。
杭叉智能

杭叉集团已研发成功三吨以上重载堆垛式AGV、窄巷道三向AGV等特殊车型,通过激光引导,具备自动导航、自主充电、故障自诊断等功能。


