







最近,国外的科学家创造出了一种完全由真空驱动的软壳机器人,它可以通过吸进和排除空气,实现各种不同任务,比如爬垂直的墙面和抓取物体等。为了能够让这种机器人移动起来,内部的空气必须要从各个部分中被吸走。收到人体肌肉收缩的启发,当它真空的特性被启动,单个软性部分的组件就会被激活。这种软壳机器人可以利用吸力来抓取物体或者将自己粘在光滑的表面上,同时就可以完成各种各样的任务,而这些都要感谢它独特的真空特性。这种机器人可以用来被分配执行不同的任务,并且具有高度模块化和多功能的特性,并且在研究和工业领域都将具有广泛的应用前景。“我们所拥有的是一种具有完整功能的机器人,它完全由真空驱动,而这是前所未有的一种体验。”瑞士EPFL的Matt Robertson表示。

“之前我们曾展示过同样由真空驱动的单个部件,但是从未在完成的系统中使用过。”Robertson表示。真空动力组件是对这种机器人的一种补充,更重要的是,在使用的时候它非常安全。目前市面上大多数的机器人都是通过施加压力来执行操作,比如持续向内部注入空气。当然,这种高压驱动的方式也会带来安全隐患,在极端的情况下会有爆炸的可能。

相比之下,由真空驱动的动力装置不仅安全柔软,而且易于建造。EPFL的科学家Jamie Paik表示:“更重要的是,我们的软性结构采用了即插即用的设计,因此可以通过相同的模块组装出完成不同任务的机器人。”它们可以被重新组合,适应不同的要求,比如爬行、抓取容器以及垂直爬行等。
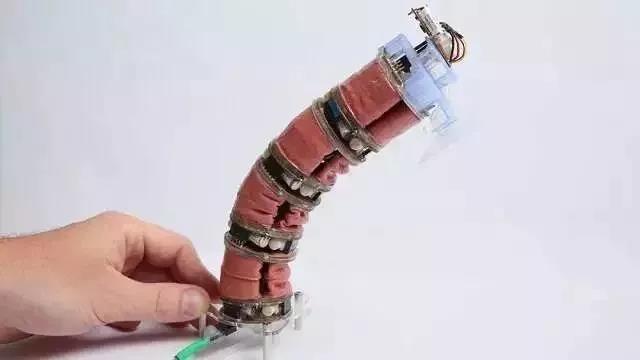
如果由五个模块组合的话,就可以像触须一样移动;而四个模块组合到一起,则可以抓住某个物体然后掷向某个目标。而三个模块可以让机器人在地上爬行,两个模块则可以成为可以的垫脚,能够在像玻璃一样光滑的表面上固定。研究人员表示,这种机器人未来在移动和工业领域中,拥有非常巨大的应用前景。


