







作为工业机器人核心零部件的精密减速器,与通用减速器相比,机器人用减速器要求具有传动链短、体积小、功率大、质量轻和易于控制等特点。
大量应用在关节型机器人上的减速器主要有两类:RV减速器和谐波减速器。
1 RV减速器和谐波减速器的原理和优劣势
RV减速器:
用于转矩大的机器人腿部腰部和肘部三个关节,负载大的工业机器人,一二三轴都是用RV。相比谐波减速机,RV减速机的关键在于加工工艺和装配工艺。RV减速机具有更高的疲劳强度、刚度和寿命,不像谐波传动那样随着使用时间增长,运动精度会显著降低,其缺点是重量重,外形尺寸较大。
▲RV-E型减速器▲
谐波减速器:
用于负载小的工业机器人或大型机器人末端几个轴,谐波减速器是谐波传动装置的一种,谐波传动装置包括谐波加速器和谐波减速器。谐波减速器主要包括:刚轮、柔轮、轴承和波发生器三者,四者缺一不可。其中,刚轮的齿数略大于柔轮的齿数。谐波减速机用于小型机器人特点是体积小、重量轻、承载能力大、运动精度高,单级传动比大。

▲谐波减速器▲
两者都是少齿差啮合,不同的是谐波里的一种关键齿轮是柔性的,它需要反复的高速变形,所以它比较脆弱,承载力和寿命都有限。RV通常是用摆线针轮,谐波以前都是用渐开线齿形,现在有部分厂家使用了双圆弧齿形,这种齿形比渐开线先进很多。
减速器的两巨头是Nabtesco和Hamonica Drive,他们几乎垄断了全球的机器人用减速器。这两种减速器都是微米级的加工精度,光这一条在量产阶段可靠性高就很难了,更别说几千转的高速运转,而且还要高寿命。
谐波减速器由“柔轮、波发生器、刚轮、轴承”这四个基本部件构成。
柔轮的外径略小于刚轮的内径,通常柔轮比刚轮少2个齿。波发生器的椭圆型形状决定了柔轮和刚轮的齿接触点分布在介于椭圆中心的两个对立面。波发生器转动的过程中,柔轮和刚轮齿接触部分开始啮合。波发生器每正时针旋转180°,柔轮就相当于刚轮逆时针旋转1个齿数差。在180°对称的两处,全部齿数的30%以上同时啮合,这也造就了其高转矩传送。
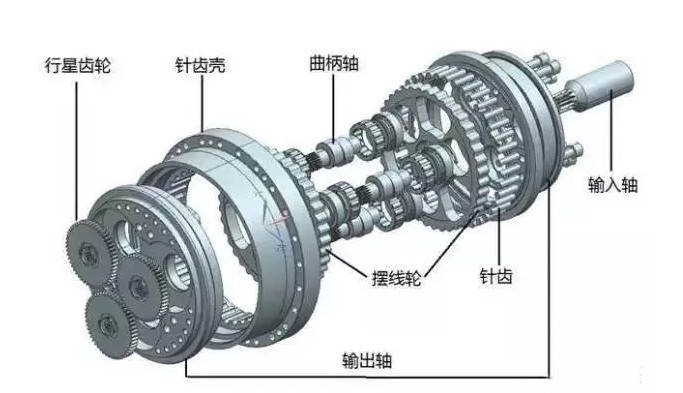
相比谐波减速器,RV传动是新兴起的一种传动,它是在传统针摆行星传动的基础上发展出来的,不仅克服了一般针摆传动的缺点,还具有体积小、重量轻、传动比范围大、寿命长、精度保持稳定、效率高、传动平稳等一系列优点。
RV减速器是由摆线针轮和行星支架组成,以其体积小、抗冲击力强、扭矩大、定位精度高、振动小、减速比大等诸多优点被广泛应用于工业机器人、机床、医疗检测设备、卫星接收系统等领域。
RV减速器的壳体和摆线针轮是通过实体的钢来发生传动的,因此承载能力强。而谐波减速器的柔轮可不断发生变形来传递扭矩,这一点决定了谐波减速器承受大扭矩和冲击载荷的能力有限,因此一般运用在前端。

2 RV减速器和谐波减速器两者的优劣势
谐波减速器结构简单紧凑,适合于小型化、低、中载荷的应用。
RV减速器刚性好、抗冲击能力强、传动平稳、精度高,适合中、重载荷的应用,但RV减速器需要传递很大的扭矩,承受很大的过载冲击,保证预期的工作寿命,因而在设计上使用了相对复杂的过定位结构,制造工艺和成本控制难度较大。RV减速器内部没有弹性形变的受力元件,所以能够承受一定扭矩。RV减速器的轴承是其薄弱环节,受力时很容易突破轴承受力极限而导致轴承异常磨损或破裂。在高速运转时这个问题更突出,所以RV减速机的额定扭矩随输入转速下降非常明显。
3 减速器之间是否存在取代关系
正方观点:
RV减速器较机器人中常用的谐波传动具有高得多的疲劳强度、刚度和寿命,而且回差精度稳定,不像谐波传动那样随着使用时间增长运动精度就会显著降低。所以许多国家的高精度机器人传动多采用RV减速器,因此,RV减速器在先进机器人传动中有逐渐取代谐波减速器的发展趋势。
这些产品在某些型号上确实存在替代关系,但这几类减速器只能实现部分替代。绝大部分情况下,各类减速器很难实现替换,比如在速比方面,谐波和RV的速比都要远远大于行星,所以小速比领域是行星的天下。当然行星的速比是可以做大的,但是很难去替换谐波和RV。又比如刚性方面,行星和RV的刚性要好于谐波,在体现刚性的使用工况下,谐波很难有好的表现。
谐波减速器的特点是轻和小,在这方面,行星和RV却很难做到。所以各类减速器只能在一部分情况下可实现替换,但是如果一种产品全方位替换另一种产品是不现实的。
反方观点:
各类减速器之间不能相互取代,而是一种互补的关系。
RV和谐波这两种传动有互补性,但也不排除结构设计优化和制造工艺突破后,在中低载荷应用领域形成局部竞争。


