
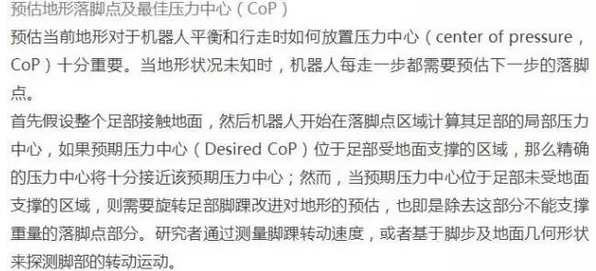
在解释此项技术的论文中,研究人员表示“机器人通过对足中心施展压力来探索接触面,根据探索阶段中足的旋转勾画出可以受力的平衡点”。通过探索和计算,机器人可以决定如何“踩下去”。它还会通过上身的运动,比如挥胳膊,来保持或找回平衡。在测试中,它可以走过崎岖不平的水泥砖路。


仿真图:Atlas机器人走过随机方向的线性踏脚石(上图),以及点状落脚点(下图),每走一步都会预估新的落脚点,控制算法相应的调整机器人步伐。
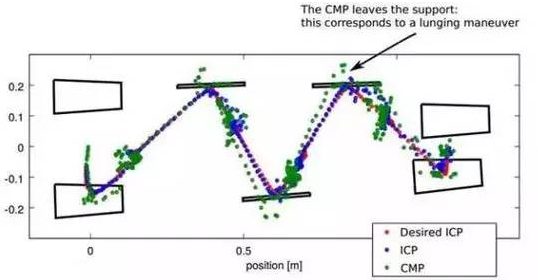
Atlas机器人从左向右行走(俯视图)的地面参考点实际数据:黑色多边形指线拟合的落脚点区域,红点指预期的瞬时捕捉点(Desired ICP),蓝点指实际瞬时捕捉点(ICP),绿点指的是机器人的质心矩轴(CMP)。(DeepTech深科技)

【免责声明】所刊原创内容之本文仅代表作者本人观点,与新战略机器人网无关。新战略机器人网站对文中陈述、观点判断保持中立。本网转载自其它媒体的信息,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。
【版权声明】凡本网注明“来源:xzl机器人”的所有作品,著作权属于新战略机器人网站所有,未经本站之同意或授权,任何人不得以任何形式重制、转载、散布、引用、变更、播送或出版该内容之全部或局部,亦不得有其他任何违反本站著作权之行为。违反上述声明者,本网将追究其相关法律责任。转载、散布、引用须注明原文来源。










