







(日经技术))安川电机开发出了在机器人模拟器上自动生成机器人动作轨道的“路径规划(Path Planning)功能”。通过使部分示教作业自动化,可减轻作业者的负担,并缩短生产系统的设置时间及工序准备时间。
关于新功能,只要在安川电机的机器人模拟器“MotoSimEG-VRC”上输入动作开始姿势、结束姿势及动作生成条件,就会自动生成可避开周围障碍物的轨道(图1)。即使是示教难度大的双腕机器人,也可轻松生成左右臂不会碰撞的轨道。

生成的轨道通过安川电机的机器人编程语言转换为机器人动作,因此可实现高速、高精度的示教再现。由于是在确保机器人与障碍物之间任意空间的同时生成节拍短的动作,因此还可应对模拟与实际环境存在误差的情况。另外,还可生成使机器人握持工件的姿势保持固定的轨道,因此还可满足液体搬运系统的使用要求。
具体用途方面,可用于部件配给系统(图2)。通过使新功能与3D形状识别功能、自动生成握持及换手动作的功能相融合,每次都会自动生成动作程序。这样便可缩短节拍时间。

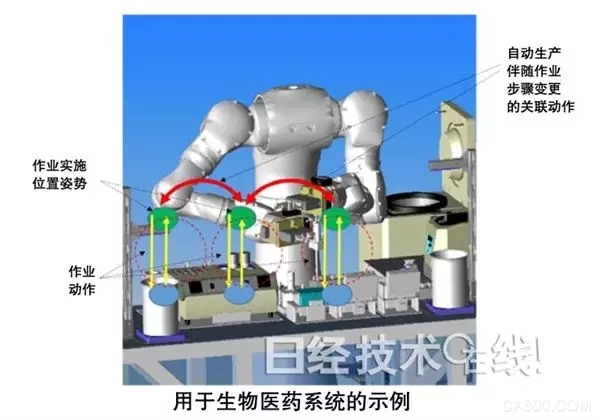
其他用途还有在医药开发、制药及临床检查领域使用的机器人系统(图3)。在该研究领域,实验作业步骤会频繁改变,每次都必须变更机器人的动作程序。而使用新功能时,即使没有机器人专家也可变更程序。而且,紧急停止时的复位动作也可自动执行。
安川电机将在2016年6月15~17日举行的“机器人产业对接展北九州”上,展出嵌入路径规划功能的部件配给系统。
延伸阅读:移动机器人路径规划算法研究成果
实际上,移动机器人的路径规划方法是基于不同的环境和具体的移动机器人控制体系结构的,在差异较大的环境中对于性能不同的移动机器人来说,不同的路径规划方法各有自己的优势与劣势。目前还没有一种规划方法适合各种环境任何系统,并且有时候选择不同的规划方法结合双方的优点可以取得更好的规划效果。
成果一:机器人路径规划算法部分
在2011年12月—2011年3月期间,我们对不同的路径规划算法进行了研究,并且利用Matlab软件对其进行编程仿真,并且我们对仿真结果,进行了数据分析和研究,对不同的算法进行了对比,提出了各自的优缺点。下面我们选取几种已经做好的算法进行成果展示,分别为A*算法、人工势场算法等。并且我们又进一步实现了避障及导航线循迹算法,为以后的研究工作奠定了基础。
附录为A*算法的流程,对于其他算法的模型及流程,详见各开发文档。
1、A*算法matlab仿真结果
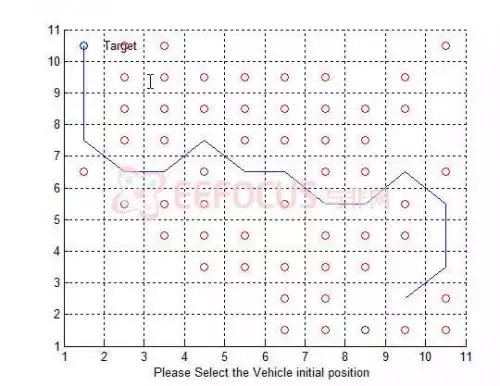
上图为采用A*算法的路径规划结果。图中红色圆点表示障碍物,蓝色圆点表示起始点。由图可以看出,A*算法的规划效果比较
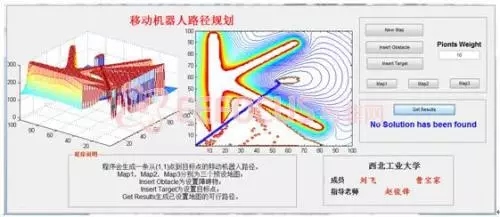
2、人工势场算法matlab仿真结果

人工势场法的基本原理就是在机器人所处离散环境中的每一点赋一个势场值,的值是目标点的引力和障碍物的斥力的叠加。

和是距离影响因子,为与目标的距离,为与障碍物的距离。因此机器人的路径规划就是从起始点沿着势场最快下降的方向达到目标点。

人工势场受力模型图
该方法的优点是在数学描述上简洁,可以使机器人迅速躲开突发障碍物,实时性好,因而经常被用于局部路径规划的设计。
但是人工势场法的缺点也比较多:
如下图所示,会产生错误的结果:
1、存在陷阱区域:就是在路径规划中经常会碰到局部极值点,也就是引力和斥力相等,合力为零的点,从而使机器人运动到一个死区,导致规划失败。
2、当目标点附近有障碍物时,智能机器人将永远也到达不了目的地。在以往的一些研究中,目标点和障碍物都离得很远,当机器人逼近目标点时,障碍物的斥力变的很小,甚至可以忽略,机器人将只受到吸引力的作用而直达目标。但在许多实际环境中,往往至少有一个障碍物与目标点离得很近,在这种情况下,在智能机器人逼近目标的同时,它也将向障碍物靠近,由于引力场函数和斥力场函数的定义,斥力将比引力大得多,这样目标点将不是整个势场的全局最小点,因此智能机器人将可能达不到目标。
3、在障碍物密集的区域会产生震荡,从而无法完成路径规划。
4、在连续狭窄的障碍物通道中摆动,或是无法发现路径。
成果二:智能小车(基于摄像头)导航
从2010年12月至2011年3月,我们设计并且制作了智能小车(AGV),用以完成该项目的导航线路径规划部分。目前,我们已经将智能小车设计并组装完毕。并且已经完成了部分软件设计。目前小车能够通过摄像头采取到如下(第3部分)图片。使小车能够循线行驶。并且能将各传感器信息进行融合,从而达到较好的导航效果。下面我将从三个方面进行成果展示,其一为赛道举例,其二为硬件电路设计,其三为摄像头采集图片示例。
赛道举例
硬件电路设计
驱动电路模块,利用以下驱动电路实现,利用两个BTS7960芯片,BTS7960是半桥驱动芯片,就是说需要2个芯片来驱动一个电机,电流最高43A,其内阻很小,所以散热不是很厉害。电机的控制芯片。一般情况下用的有33886或者是BTS7960控制芯片,前者是电路中的全桥控制电路,就是说一片就可以完成变速和正转与反转。而后者是半桥控制电路,就是说一片只能完成变速,但是不能完成转向的切换,若需要换向时,可用两片BTS7960搭接成全桥电路即可。其工作原理是由主控制芯片(一般情况下为单片机)根据加速或减速以及正转或反转的信息产生相应的PWM波形,而该PWM波形将会送人电机控制芯片,电机控制芯片将会产生相应的响应来改变电机两端的电压,从而实现变压调速。


