







▲迈尔微视S系列避障相机语义识别实测
迈尔微视作为国内首家专注于移动机器人视觉技术的公司,针对移动机器人避障应用,已于去年推出了高性价比的RGB-D多模态工业级避障相机S系列,现已批量应用于无人叉车、堆垛机、潜伏车、料箱车、工业清洁机器人,以及医疗和服务机器人等多种场景中。
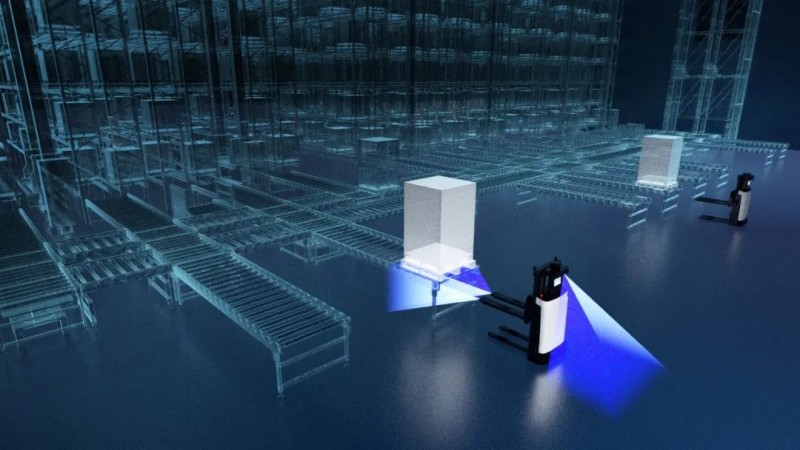
S系列避障相机能够实时获取周围环境的三维信息和RGB纹理信息,可以很好感知到低矮、悬空障碍物,S系列避障相机自带的避障算法,通过结合RGB图像和深度图像,能更加全面地理解周围环境,实现高效的语义识别和分类,不仅可识别障碍物的位置和大小,还能理解其类型,如人或不同形状的物体等。相比于2D激光雷达,采用S系列避障相机能够更好地实现移动机器人的避障功能,让移动机器人运行更安全、更稳定、更智能。
在S系列设计的初期阶段,为了提高产品的易用性和稳定性,迈尔微视团队充分借鉴了多年在移动机器人领域的经验,对相机的数据通信方式、物理接口、避障参数设置以及结果输出格式都进行了细致的考量。
相机的数据通讯和传输接口采用工业级航空插头的设计,以确保稳定可靠的数据传输。
考虑到移动机器人在使用2D激光雷达作为避障传感器时,普遍通过定义避障区域的方法来实现其功能,因此S系列避障相机在行业内率先采用了通过设置移动机器人的3D空间避障区域,来实现整个3D空间障碍物的检测,对检测的结果同样直接通过I/O接口告知控制器,非常方便移动机器人控制系统的对接联调。
在实际使用中,考虑到不同用户针对不同应用场景的多样化需求,迈尔微视避障解决方案允许用户根据实际路径和环境自定义避障参数,从而增强系统的适应性和准确性,使得S系列避障相机能够更好满足工业移动机器人应用的视觉避障需求。
为了进一步提升产品竞争力,迈尔微视将继续推出两款升级后的避障相机产品S2 Max与S3相机,新产品将提升黑色叉臂的识别能力,并更好地适用于在叉齿下端安装的避障解决方案。
5月9日,由迈尔微视参编的《叉式移动机器人(AGV/AMR)产业发展蓝皮书(2024版)》将在“inktype="text" imgurl="" imgdata="null" data-itemshowtype="0" tab="innerlink" data-linktype="2" hasload="1">第十三届制造业物流与仓储智能化工程大会暨第二届全球叉式移动机器人峰会”上正式发布,敬请期待!


