







当今,世界经济和产业格局正处于大调整、大变革和大发展的新时期,制造业作为国民经济的支柱产业,保持由大变强是实现经济稳增长、调结构、提质增效的客观要求。自动化与信息化的融合为中国制造业转型升级带来了新机遇,国家高度重视智能制造产业的发展,出台了一系列政策措施。雷赛智能作为国内工业控制领域的先行者,积极响应时代变革的号角,在运动控制、伺服系统、传感器等领域实现重大技术突破,持续推出运控新品为企业智能化产线改造提供有力保障。
智能产线化转型是制造行业升级的重要方向,如何从传统的单一设备生产快速转向产线化智能化生产?如何打造好一条可以高品质生产、高效率生产与智能化生产的先进产线?
雷赛智能针对上述场景,融合需求、提炼痛点,雷赛基于20多年运动控制经验,重新定义智能化产线控制设备。
3月12日重磅推出EMC系列EtherCAT运动控制器

EMC系列运动控制器,融合了多场景工艺算法、强大的负载能力、优秀的扩展能力、易用的设计风格,为产线智能化转型带来崭新的解决方案。控制器颠覆传统控制方式,采用控制器分布式组网控制方式,最大支持254个控制器组网运行,更加贴合智能产线化控制,针对产线故障宕机的情况,分布式组网控制不受单机设备宕机影响,可实现其他组网节点不停产进行诊断排查,为产能保驾护航。

EMC系列运动控制器,针对复杂多样的运动控制场景,支持T型、S型、Splus型、正余弦等多种点位运动速度规划模式,覆盖全方位应用场景。Splus速度规划模式可以有效抑制振动,提升20%运动效率,满足了既要效率,又要平稳性的工艺场景。

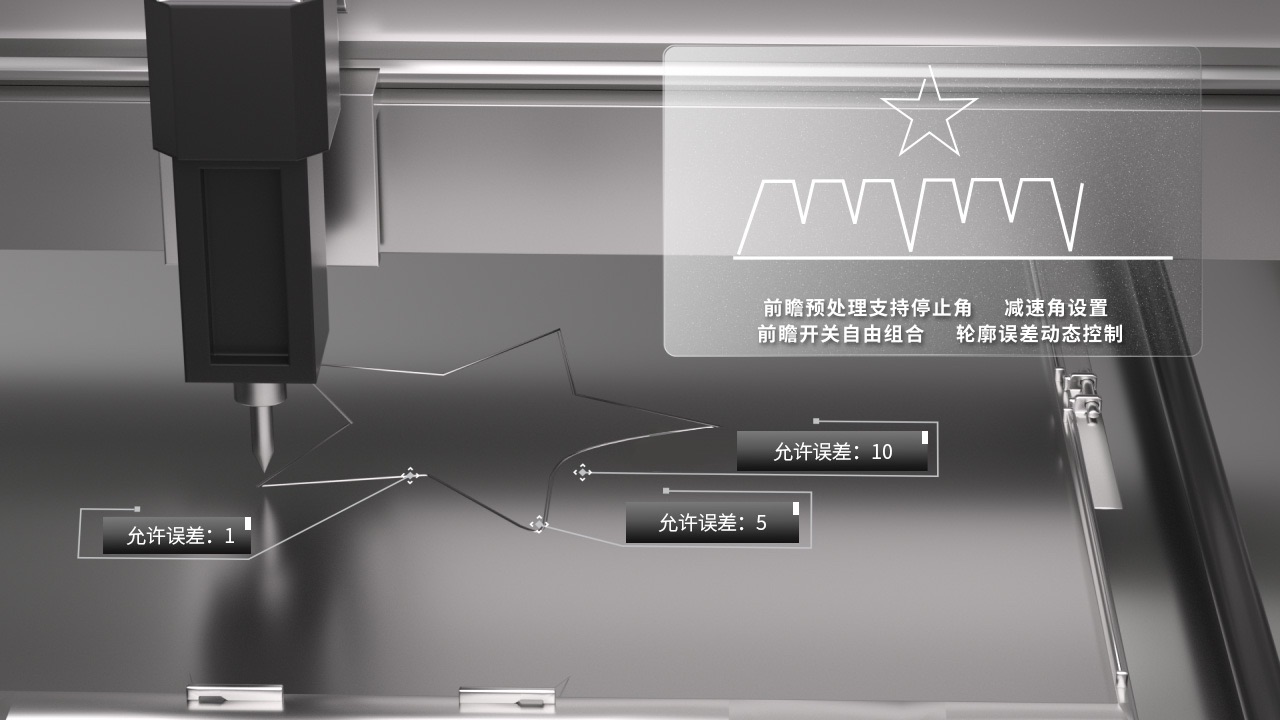
轨迹运动场景支持前瞻预处理的减速角设置、停止角设置,支持轮廓误差动态调整、前瞻非前瞻自由搭配组合,强大的连续轨迹前瞻预处理功能,可实现高精度的轨迹过渡和灵活的速度规划,设备又快又稳,为点胶、激光焊接与切割、工件表面飞拍检测等多场景提供一站式解决方案。
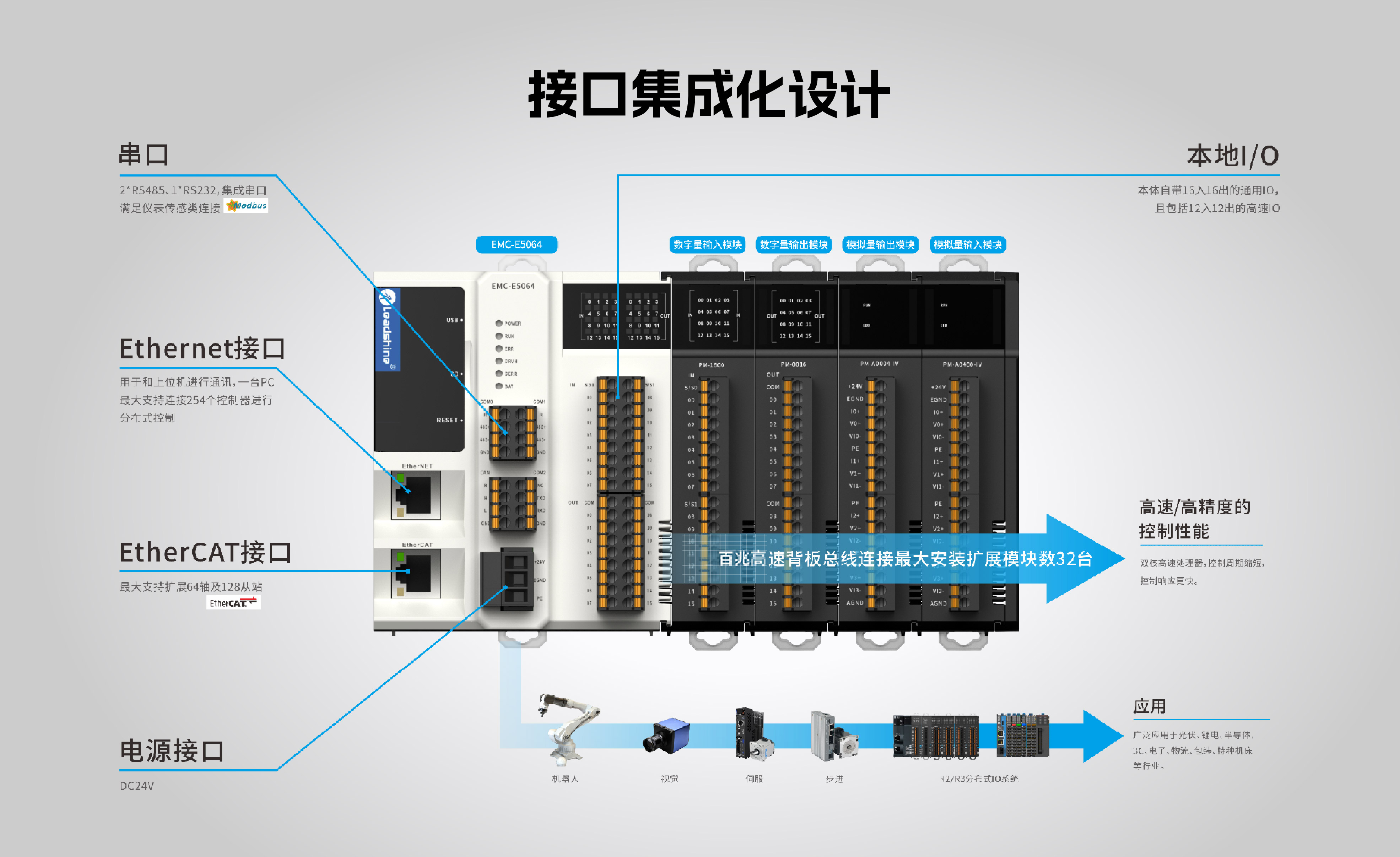
EMC系列运动控制器采用小体积、易安装、集成化设计,结合嵌入式工控机可节省电柜约50%空间。硬件平台整体采用强抗干扰设计,电气干扰无懈可击!控制器本体支持RS232、RS485接口,支持标准及自定义扩展的Modbus通讯协议,满足了智能化产线多传感实时监控生产过程的需求。百兆高速背板总线协议,最大可扩展32个背板模块,模块类型覆盖数字量、模拟量、编码器等多种类型可供选配,扩展模块采用垂直快速插拔方式,解决了广大工程师因方案升级改造带来的扩展性能、扩展空间有限的痛点,其本体的高速背板总线可实现us级的I0同步刷新,提高设备的响应效率,提升安全性和加工精度。其强大的负载能力最大支持扩展 64 轴 128 从站,总线控制同步抖动小于10us。
雷赛智能深耕运动控制20多年,提炼行业设备共性需求,致力于行业设备工艺算法的开发与积累,为广大客户提供高效易用的功能模块:如同步追踪功能,工件物料在流水线上动态加工,灵活应对追剪、飞行点胶、飞行切割等生产工艺。指令缓存功能,把运动指令提前设置到控制器中,相较普通API立即交互指令效率提升20%,对高速高节拍工艺场景可以显著提升设备效率。

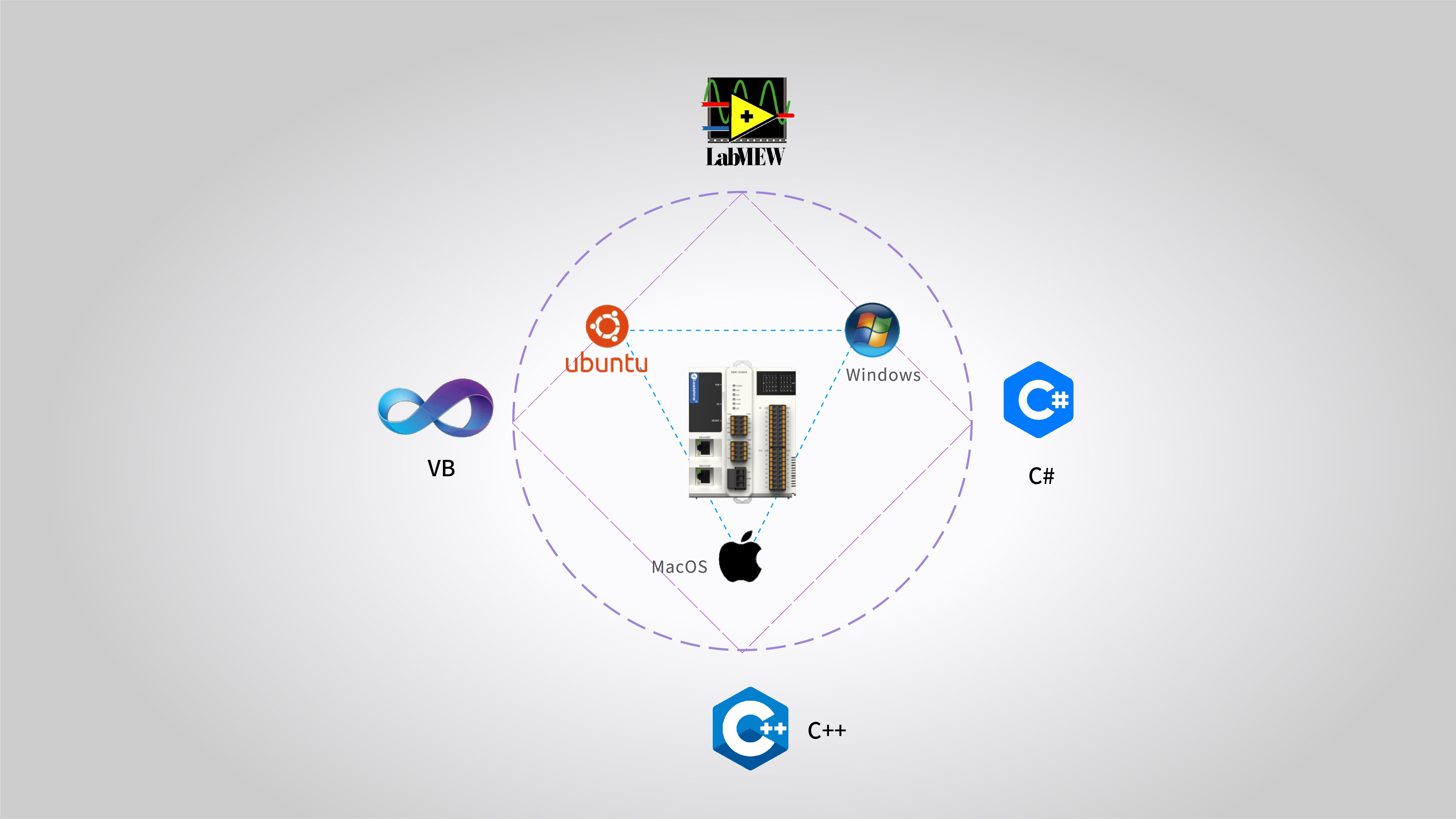
EMC系列运动控制器结合了客户操作系统通用性与开发语言多样化需求,支持Windows、Linux、MacOS三种系统平台,支持VC、VB、C#、LabVIEW等高级语言开发,让系统开发更具灵活性。产品易用性方面,继承雷赛控制卡原有函数接口,并配套强大的调试软件:支持采样跟踪、在线仿真、函数打印、驱动调试、从站一键扫描组态、总线诊断等简单易用的功能,开发效率提升30%以上。
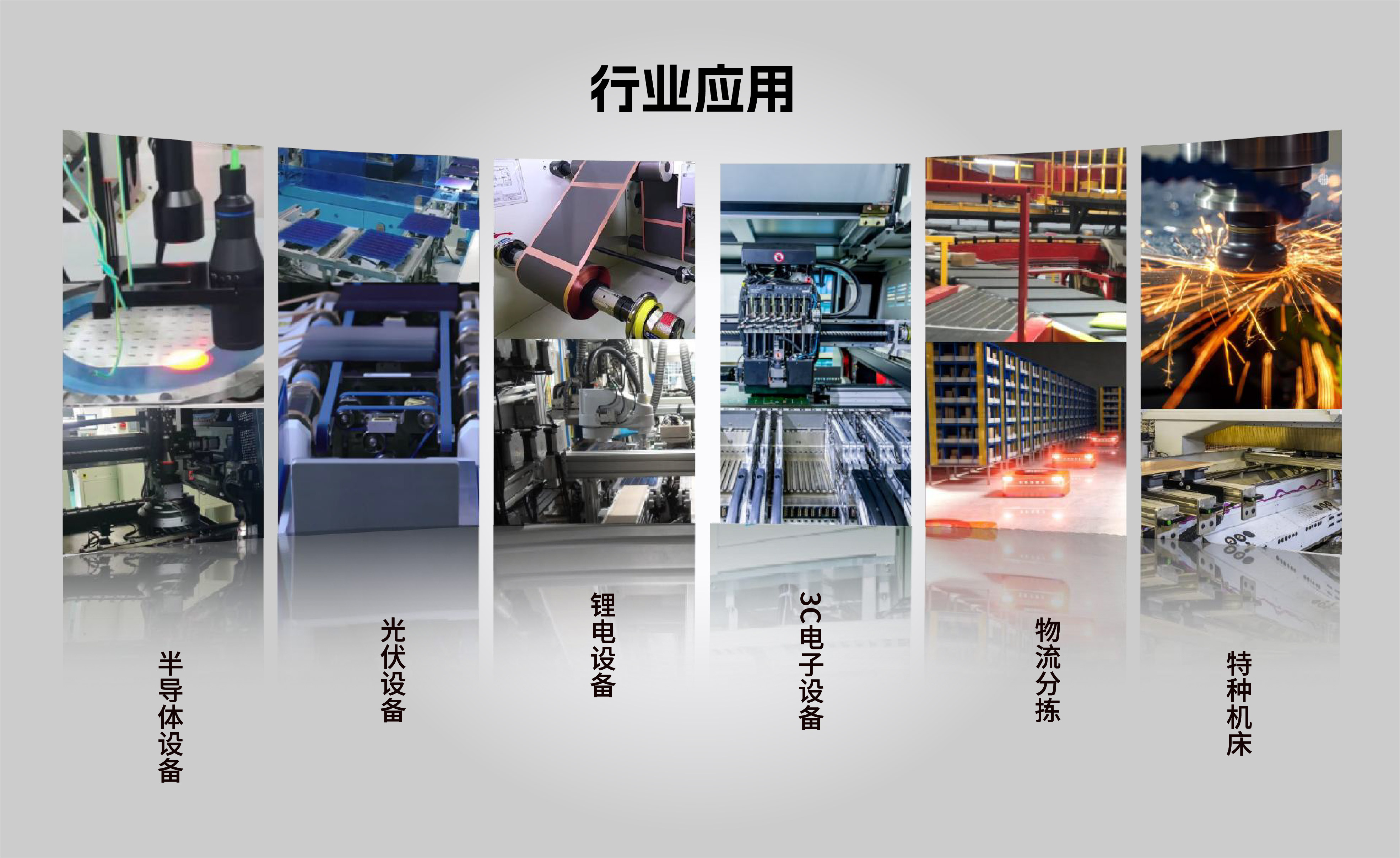
EMC系列运动控制器融合6大核心优势:分布式、高性能、省空间、易扩展、抗干扰、易使用,可广泛应用于:3C电子、半导体、光伏、锂电、物流分拣、特种机床等行业的智能产线化转型,欢迎大家关注选购。
回顾雷赛智能的历史,从1997年推出国内第一张控制卡产品,20多年来一直深耕运动控制领域,沉淀了非常多的运动控制经验、积累了非常多的行业工艺算法,深受运控行业客户认可,同时控制器产品也推陈出新:从2010年的爆品SMC6490大批量应用于3C行业,到2014年推出脉冲型系列化产品,2017年率先推出E总线控制器,至今再推出新品的EMC系列运动控制器,不得不让人翘首期待!


