







据中国移动机器人(AGV/AMR)产业联盟数据、新战略移动机器人产业研究所统计,2021年中国叉式移动机器人(含视觉导航)销量达8000台,同比增长60%,市场规模约为24.5亿元,同比增长42.40%。
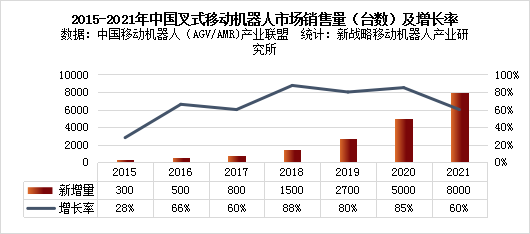
图表:2015-2021年中国叉式移动机器人市场销售量(台数)及增长率
作为无人叉车代表企业之一,2021年,未来机器人完成订单合同总金额增长300%,单笔合同平均金额增长150%,客户重复采购率达到40%以上,落地项目大面积覆盖制造工业、仓储物流、机械制造等细分行业的“深水区”场景。
产品+方案双管齐下,打通深水区全场景
“深水区”来源邓小平一次讲话:“中国的改革是摸着石头过河。刚开始时在河边,水比较浅,石头比较好摸,现在进入深水区,石头不好摸了。”未来机器人CEO李陆洋借用“深水区”,用来指代无人叉车面对的复杂多变的场景环境。
相比流程简单,货物标准,低位存取,平面搬运等相对简单的浅水区场景,在“深水区”场景中,无人叉车需要应对人车混场、货物乱放、载具不标准、货车类型多样化等因素,更加考验无人叉车的单车作业峰值效率、操作精度和复杂场景适应能力。“深水区”场景也是客户的痛点难点所在,围绕这类痛点难题,未来机器人从产品和方案两个方面进行突破,并积累了大量的项目经验。
产品:E&O系列直击行业痛点
2021年,针对行业场景痛点,未来机器人先后推出E系列与O系列,完成产品矩阵迭代升级。
E系列室内/外平衡重无人叉车:该系列产品解锁外月台装卸这一核心场景需求,实现无人叉车室内外全场景应用。通过配置3D激光+视觉感知技术、多轴实时运动规划技术以及高精度视觉伺服控制技术,E系列室内/外平衡重无人叉车具备应对光照变化的室外定位能力、三维环境感知能力、准确高效的视觉伺服控制能力,复杂多变环境下峰值效率可比拟人工作业峰值效率。
O系列全向无人叉车:该系列产品针对大体积、多变流程、复杂场景下的搬运。「O」系列全向无人叉车能实现360°中心回旋,零直角转弯内半径,全方位的任意移动,搭配车身的窄体式设计,实现窄通道内货物存取、大体积(超长/超宽)物料的灵活运转等,有效提升空间利用率和仓储库容率。
截止目前,未来机器人已经发布九大系列无人叉车,大面积覆盖不同行业深水区场景需求。

方案:覆盖深水区刚需场景
产品迭代升级,方案层同样攻关克难,仓库月台作为货物进出的刚需场景,无论是外部物料从卡车上卸下进入仓库,还是仓库内物料的运送装上货车,两个看似简单的流程都存在着作业效率低、安全性低、货损率高等问题,对此,未来机器人早在2020年就实现了无人化装卸解决方案,在2021年再次突破升级。
外月台飞翼车无人装卸
该解决方案在去年CeMAT ASIA 2021展会上首次对外正式发布,以VNE20及VNP15两台无人叉车,双车双流程还原演绎外月台飞翼车无人装卸场景。未来机器人自主研发的视觉导航系统和感知定位,使无人叉车具备强抗干扰性,抵抗室外强光干扰,高度的精确性足以媲美人工作业,对人/库位/货物等进行智能识别,达到全局定位与局部精准定位,提升无人叉车作业的效率,同时配置中控调度系统,匹配物流与信息流,实时监测无人叉车的运行状态,完成多个叉车的实时调度。
外月台厢式货车无人装卸
继飞翼车之后,未来机器人继续攻克难度等级几乎为跨越式的厢式货车无人装卸场景,同时基于场景并在石化行业落地国内首个厢式货车无人装卸项目案例。
该项目配置的VNE20无人叉车基于未来机器人无人驾驶框架,采用视觉加激光定位方案,能够应对光线变化的室外定位。无人叉车载货进入狭长的车厢后,通过感知激光和视觉定位,在宽度为2.35m的车厢,货物左右间隙小于30mm的环境内,完成两列货物18托的精准摆放,定位精确性达到几乎可与人工作业媲美的程度。
此外,搭载未来机器人自主研发的中控调度系统,与客户立库WMS系统通过局域网对接,实现无人叉车任务调度和车辆调度功能。当司机将卡车停好,登车桥搭好后,在立库系统下发出库任务,立库系统将目标装车货物运送至立库出库口,货物到达输送线末端后,输送线PLC发送装车需求信号给无人叉车中控系统,调度无人叉车叉取货物进行装车。
整个装货流程除却在终端下发任务外,无需人工过多干涉,提升装货流程安全性,减少因人工搬运造成的货物损坏情况,同时减少卡车等待时间,提升整体作业效率。
该方案为客户带来工厂装卸效率大幅提升,缩短了卡车滞留等待时间,车队利用率也随之上升,节约了运输成本;同时,提升了每个月台的装卸量,加快货物进出库速度,减少缓存区域面积,降低了我们的仓库成本,实现从仓库内部到货物出库装车的全流程自动化。
除此之外,未来机器人还突破了国内6层以上料框堆叠、9.4米高位存取、2.0窄通道存取等多个首例,打造柔性解决方案,实现覆盖外月台装车、料笼堆叠、货物上下架、室外长距离运输等核心刚需场景。
首个6层料框精准堆叠解决方案:以未来机器人无人叉车为操作机,针对多种规格、不同载重料框堆叠而开发,整体堆叠高度可达约5.3m,这是未来机器人面向工厂物流及仓储物流,直击无人化高位堆叠痛点一大行动和突破。
9.4米高位货架密集存储:采用R系列前移式无人叉车,突破9米高位存取应用。高位存储的存在视野盲区,无人叉车采用激光末端感知 Laser Scanning,精准检测放货空间,货物摆放精度控制在±20mm,确保货物在高位存取时的安全性与精准度。
窄通道高频密集存储:采用SLIM系列托盘堆高式无人叉车,窄体式车身设计,最小直角转弯通道宽度仅需1800mm,多种混合传感器使得无人叉车具备较强的感知性能,能够自适应检测放货空间、货物位姿等。
伴随着应用场景的不断深入及应用领域的不断拓展,未来,无人叉车解决方案能实现标准化复制吗?未来机器人的销售总经理谢立在接受新战略移动机器人全媒体采访时表示,目前工业物流场景较为复杂,行业领域差异化明显,即便在同一行业中,不同的制造场景、生产流程、环节以及节奏也不相同,目前在制造场景中,未来机器人在普遍浅水区场景已经实现部分标准化复制,但在深水区场景还需要大量数据沉淀支持,无法做到完全复制,只能做到尽可能复制,这也是当前无人叉车行业的现状。
谢立表示,“当前未来机器人在做的,就是用我们的技术去解决客户现有的难题。”

软硬实力构筑“未来”长跑基石
随着机器人时代来临,2021年,未来机器人的市场业务与规模量极速增长,累计落地项目350+,项目交付100%,客户复购率达到40%以上。“未来”在无人叉车领域将要应对的挑战与规划,谢立认为,主要是围绕企业的“软硬实力”两大方面出发。
软实力:扩充团队+提高产能
国内建立合肥工厂,1:1场景复制。未来机器人在2021年于安徽合肥建设生产调试基地,该基地一方面用于提升生产线产能,应对持续增长的项目需求。另一方面,该基地还原搭建了料笼堆叠、高位存取、窄通道存取等多种工业物流刚需复杂场景,用以实现创新性技术的突破与应用。
谢立介绍,“面对深水区场景,我们希望首先要在我们的工厂内对场景达到1:1复制,在正式落地之前达到客户想要的效果,确认无误之后才能实现出货交付,同时也是缩短项目交付的时间。”
渠道赋能区域。当前未来机器人在行业内积极打通上下游合作供应商,在销售模式方面增加以渠道赋能区域的路线,深度挖掘当地区域信息,以此逐步覆盖全国渠道。
大力培养人才团队。未来机器人正处于高速发展时期,去年未来机器人交付团队人员扩招达到一百多人。据谢立介绍,现在公司对这批交付人员进行“老带新”半年培训,期间要经过两到三个项目的磨练才能保证交付人员的熟练度从而保障项目的交付效率。
硬实力:技术场景持续攻克
视觉导航技术。作为国内最早将视觉导航技术应用在无人叉车的企业之一,未来机器人自主研发的“明眸”环境检测系统是基于深度学习图像识别技术,实现全局及局部末端对库位情况、货物位姿、置货空间等信息的实时检测。借助大数据和AI智能算法,系统能有效识别和跟踪仓库中的货物、托盘、叉车和操作人员等对象,并将对象信息实时共享到用户的仓库管理系统,为企业提供库位安全信息的同时,协同AGV、巡检机器人等智能化设备的无人化作业。
攻克刚需场景。谢立提到,如何进一步提升无人叉车的高柔性和高精度以及作业的高效率,是未来机器人自成立以来所钻研追求的方向,未来还将朝着这个目标对刚需复杂场景持续攻克,真正解决客户的痛点需求,实现降本增效。同时,尽可能地打造标准化场景,实现项目规模化复制,为全行业提供解决方案。


