





12月15-17日,由中国移动机器人(AGV/AMR)产业联盟主办的“2021 中国移动机器人(AGV/AMR)行业发展年会”在北京龙熙维景国际会议中心举行,大会以“不徐不疾,向新而生”为主题,对当前产业现状和未来发展趋势进行了深入探讨。史陶比尔作为联盟理事成员企业,做了题为《大电流快充对充电连接的挑战》的专题发言。


现场图集
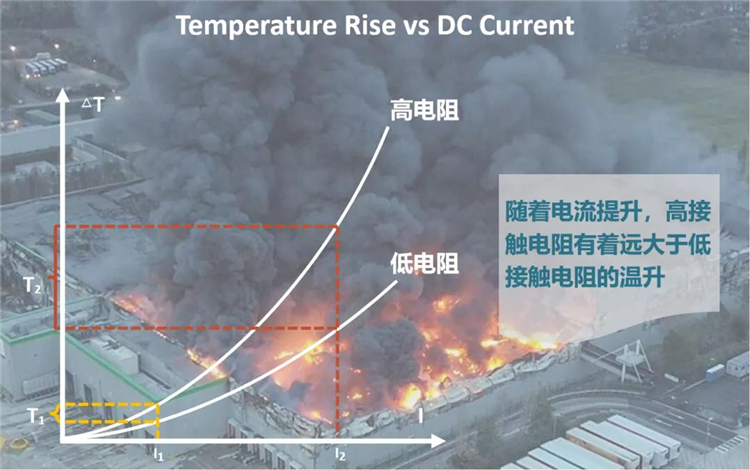
大电流快充风险
快速补能是提升移动机器人作业效率,降低闲置率的重要方式。由于自动换电成本较高,适用场景有限,快充是当前实现快速补能的主要形式。今年主流厂商发布的新一代移动机器人,开始追求更短的充电时长和更高的充放比。室内移动机器人(非重载)的充电电流从过去的10-20A提升至60-70A左右,有些要求更高。大电流虽然可以提升充电效率,但是同时也会带来更高的风险。当电流较大时,充电连接点作为电阻较大位置,一旦出现接触不良,温升会变得很高,高温升可能会导致出现短路、熔焊、电弧等现象,严重时可以引发火灾。英国最大生鲜电商Ocado的自动化仓库,曾因仓库机器人充电故障引发大火,造成1.37亿美元损失。因此,安全是提升移动机器人充电效率的前提。
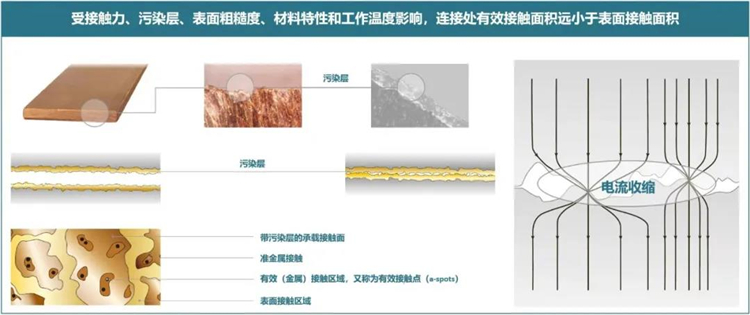
接触电阻理论
在所有接触不良火灾原因中,线路接头处接触电阻过大引起的火灾居于第一位。因此接触电阻大小直接影响着电连接质量,稳定的低接触电阻可以确保电连接长期安全可靠。根据电接触理论,金属接触表面在微观条件下总是凹凸不平的,同时受污染层(灰层、油膜、金属化合物)影响,电流通道集中在单个接触点,有效接触面积明显小于表面接触面积,看似面与面的连接,其实是点与点的连接,从而产生收缩电阻。同时污染层也会产生表面膜层电阻,最终导致接触电阻增大。
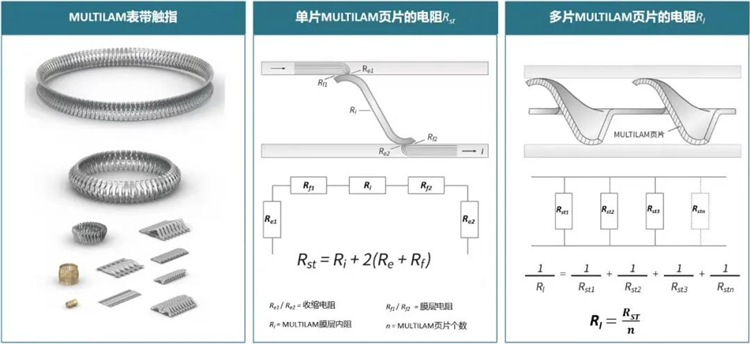
MULTILAM原理
MULTILAM技术,也称为表带触指技术,即在两个接触面之间建立平行接触点,并且提供一定的接触力,可以破坏污染层,实现有效的电连接。每一个接触页片形成独立的弹性负载回路,通过一圈若干回路的并联,能大大减少导体之间的接触电阻。MULTILAM的接触电阻Rl相当于并联连接的接触页片的电阻。每一个接触页片的几何形状均为实现长久的工作寿命而设计。页片恒定的弹性压力可以使接触界面之间的连接保持稳定,从而实现恒定的低接触电阻。
MULTILAM技术从上世纪六十年代初面市,迄今已有超半个世纪成功应用经验。它已经成为满足严苛需求应用的绝佳选择:能够在对温度、振动和冲击有严格要求的环境下安全运行;极低的接触电阻,确保大电流通过时仍然保持较低的温升;高插拔次数,可以满足百万次插拔需求。史陶比尔电连接器产品都是基于MULTILAM技术研发和生产。
充电连接器选型
高品质的充电连接器首先要保证全生命周期内稳定的低接触电阻,特别是在频繁插拔的工况下。同时还要考虑额定电流、额定电压、绝缘水平、插拔力、插拔寿命、容差能力、防护等级、抗振动和冲击性、抗腐蚀性、阻燃和耐火性能等多个方面。总而言之,要从电气性能、机械性能和环境性能三个角度去考察连接器能否满足应用。而从AGV/AMR电气标准EN1175-2020《工业车辆安全-电气要求》中,也可以找到对充电连接器的要求。无论如何,安全、高效和可靠的连接器一直是行业所需要。
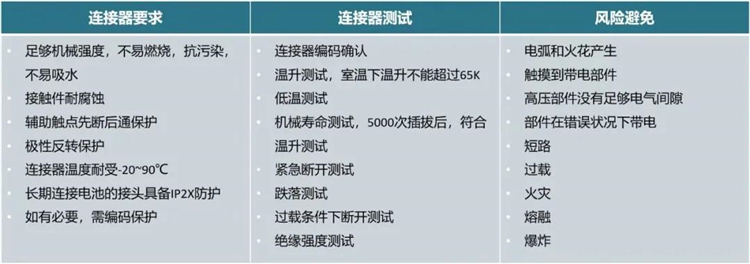
EN1175-2020对充电连接器的规范
全面的充电连接方案
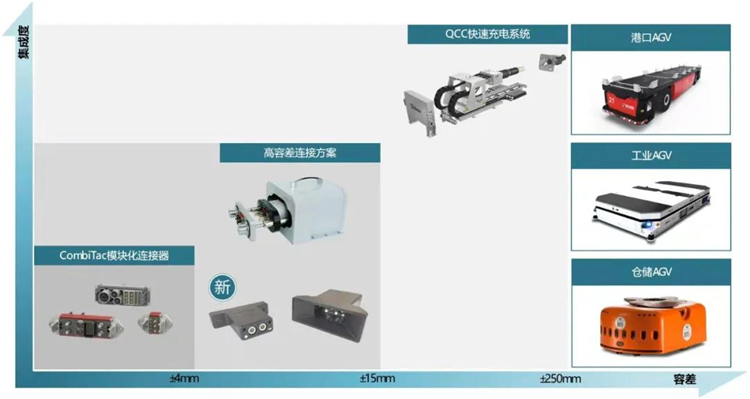
作为全球领先的电气连接专家,史陶比尔在移动机器人充电领域有着丰富的应用经验,目前已有超2万台AMR使用史陶比尔充电技术。全面的产品系列覆盖从小型仓储到大型港口移动机器人的充电,充电电流最高可达1440A,插拔次数高达10万次,具有优秀的抗冲击和抗振性能。面对移动机器人车身变薄的趋势,史陶比尔开发了新一代充电连接方案,外型极致扁平化,相比现有方案,车端开口尺寸减少70%左右,进一步完善了产品矩阵。不论移动机器人行业如何发展,安全要求始终如一。史陶比尔将坚持安全为基础,创新为动力,贴近用户需求,为行业提供更多高效充电连接方案。
史陶比尔集团是电连接器、流体连接器、机器人和纺织机械这四大事业部构成的机电一体化解决方案的全球专业供应商。史陶比尔拥有5500余名员工,在全球各大洲共计有14个工业生产基地,在29个国家/地区设立了销售和服务分公司,代理商遍及50个国家/地区。1892年,史陶比尔在苏黎世湖畔成立,如今成为总部位于瑞士法菲孔的跨国集团。


